J.E. Gordon, a leading engineer at the Royal Aircraft Establishment at Farnborough and holder of the British Silver Medal of the Royal Aeronautical Society, wrote two brilliant books on engineering: “The New Science of Strong Materials” and “Structures – Or Why Things Don’t Fall Down”. Elon Musk has recommended the latter of the two books, and I can only encourage you to read both. In my eyes, the role of a good non-fiction writer is to explain the intricacies of a non-trivial topic that we can see all around us but nevertheless rarely fully appreciate. Something interesting hidden in plain sight, if you will.
With this in mind, let’s discuss an underappreciated topic from the world of materials science.
First of all, what do we mean by a material’s stiffness and strength?
To be able to compare the load and deformation acting on components of different sizes, engineers prefer to use the quantities of stress and strain over load and deformation. Imagine a solid rod of a certain diameter and length which is being pulled apart in tension. Naturally, two rods of the same material but of different diameters and lengths will deform by different amounts. However, if both rods are stressed by the same amount, then they will experience the same amount of strain. In our simple one-dimensional rod example, the stress 

where 


The engineering strain 

where 

For an elastic material deforming linearly (i.e. no plastic deformation), the ratio of stress to strain is constant, and for our simple one-dimensional example the constant of proportionality is equal to the stiffness of the material.

This stiffness 
These two definitions of stress and strain illustrate a simple point. By dividing force by cross-sectional area and change in length (deformation) by original length, the role of geometry is eliminated entirely. This means we can deal purely in terms of material properties, i.e. Young’s modulus (stiffness), stress to failure (strength), etc., and can therefore compare the degree of loading (stress) and deformation (strain) in components of different sizes, shapes, dimensions, etc.
We can all appreciate that metals are incredibly strong and stiff. But why are some materials stronger and stiffer than others? Why don’t all materials have the same strength and stiffness? Aren’t all materials just an assemblage of molecules and atoms whose molecular bonds stretch and eventually separate upon fracture? If this is so, why don’t all materials break at the same value of stress and strain?
The stiffness and strength of a material does indeed depend on the relative stiffness and strength of the underlying chemical bonds, and these do vary from material to material. But this difference is not sufficient to explain the large variations in strength that we observe for materials such as steel and glass – that is, why does glass break so easily and steel does not?
In the 1920s, a British engineer called A.A. Griffith explained for the first time why different materials have such vastly different strengths. To calculate the theoretical maximum strength of a material, we need to use the concept of strain energy. When we stretch a rod by 1 mm using a force of 1,000 N, the 1 J of energy we exerted (0.001 m times 1,000 N) is stored within the material as strain energy because individual atomic bonds are essentially stretched like mechanical springs. Written in terms of stresses and strains, the strain energy stored within a unit volume of material is simply half the product of stress and strain:

Griffith’s brilliant insight was to equate the strain energy stored in the material just before fracture to the surface energy of the two new surfaces created upon fracture.
Surface energy??
It is probably not immediately obvious why a surface would possess energy. But from watching insects walk over water we can observe that liquids must possess some form of surface tension that stops the insect from breaking through the surface. When the surface of a liquid is extended, say by inflating a soap bubble, work is done against this surface tension and energy is stored within the surface. Similarly, when an insect is perched on the surface of a pond, its legs form small dimples on the surface of the water and this deformation causes an increase in the surface energy. In fact, we can calculate how far the insect sinks into the surface by equating the increase in surface energy to the decrease in gravitational potential energy as the insect sinks. Furthermore, liquids tend to minimise their surface energy under the geometrical and thermodynamic constraints placed upon them, and this is precisely why raindrops are spherical and not cubic.
When a liquid freezes into a solid, the underlying molecular structure changes, but the overall surface energy remains largely the same. Because the molecular bonds in solids are so much stronger than those in liquids, we can’t actually see the effect of surface tension in solids (an insect landing on a block of ice will not visibly dimple the external surface). Nevertheless, the physical concept of surface energy is still valid for solids.
So, back to our fracture problem. What we want to calculate is the stress which will separate two adjacent rows of molecules within a material. If the rows of molecules are initially

From Hooke’s law we know that

and therefore replacing 

Now, if the surface energy per square metre of the solid is equal to 


There is typically a considerable amount of plastic deformation in the material before the atomic bonds rupture. This means that the Young’s modulus decreases once the plastic regime is reached and the strain energy is roughly half of the ideal elastic case. Hence, we can simply drop the 2 in front of the square root above to get a simple, yet approximate, expression for the strength of a material

As the values of 

such that the strength of a material is approximately proportional to the Young’s modulus by the following relation

Given, the relationship between stress and strain we can conclude that the theoretical failure strain of most materials ought to be, approximately,

or 20% for basically all materials.
In everyday practise, most materials have failure strengths far beneath the theoretical maximum and also vary widely in their failure strains. To explain why, Griffith conducted some simple experiments on glass. After calculating the Young’s modulus 

The pultrusion process used to create the glass rods allowed Griffith to pull thinner and thinner rods, and as the diameter decreased, the failure stress of the rods started to increase – slowly at first, but then very rapidly. Glass fibres of 2.5 
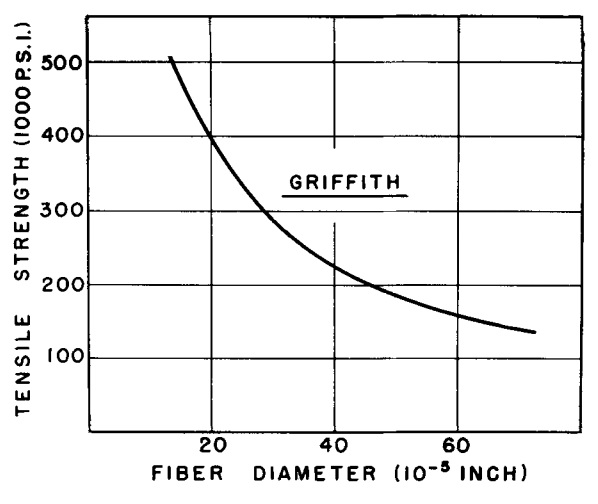
Variation of tensile strength with fibre diameter. From W.H. Otto (1955). Relationship of Tensile Strength of Glass Fibers to Diameter. Journal of the American Ceramic Society 38(3): 122-124.
Griffith’s next goal was to explain why the strength of thicker glass rods fell so far below the theoretical value. Griffith surmised that as the volume of a specimen increases, some form of weakening mechanisms must be active because the underlying chemical structure of the material remains the same. This weakening mechanism must somehow lead to an increase in the actual stress around a future failure site and act as a stress concentration. Luckily, the idea of stress concentrations had previously been introduced in the naval industry, where the weakening effects of hatchways and other openings in the hull had to be accounted for. Griffith decided that he would apply the same concept at a much smaller scale and consider the effects of molecular “openings” in a series of chemical bonds.
The idea of a stress concentration is quite simple. Any hole or sharp notch in a material causes an increase in the local stress around the feature. Rather counter-intuitively, the increase in local stress is solely a function of the shape of the notch and not of its size. A tiny hole will weaken the material just as much as a large one will. This means a shallow cut in a branch will lower the load-carrying capacity just as well as a deep one – it is the sharpness of the cut that increases the stress.
We can visualise quite easily what must happen at a molecular scale when we introduce a notch in a series of molecules. A single strand of molecules must reach the maximum theoretical strength. Similarly, placing a number of such strands side by side should not effect the strength. However, if we cut a number of adjacent strands at a specific location perpendicular to the loading direction, then the flow of stress from molecule to molecule has been interrupted and the load in the material has to be redistributed to somewhere else. Naturally, the extra load simply goes around the notch and will therefore have to pass through the first intact bond. As a result, this bond will fail much earlier than any of the other bonds as the stress is concentrated in this single bond. As this overloaded bond breaks, the situation becomes slightly worse because the next bond down the line has to carry the extra load of all the broken bonds.
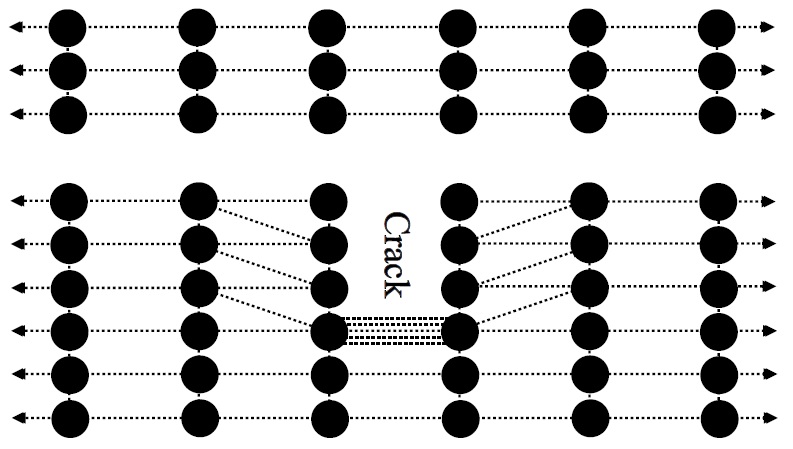
Stress concentration at a notch
The stress concentration factor of a notch of half-length 


If we now consider a crack about 2

and therefore this would lower the theoretical strength of glass from 14,000 MPa to around 70 MPa, which is very close to the average strength of typical domestic glass.
As a result, Griffith made the conjecture that glass and all other materials are full of tiny little cracks that are too small to be seen but nevertheless significantly reduce the theoretical maximum strength. Griffith did not give an explanation for why these cracks appeared in the first place or why they were rarer for thinner glass rods. As it turns out, Griffith was correct about the mechanism of stress concentrationa, but wrong about their origins.
It took quite some time until a more satisfactory explanation was provided, dispelling the notion that the reduction in strength could be attributed to inherent defects within the material. After WWII, experiments showed that even thick glass rods could approach the theoretical upper limit of strength when carefully manufactured. It was also noticed that stronger fibres would weaken over time, probably as a result of handling, and that weakened fibres could consequently be strengthened again by chemically removing the top surface. By depositing sodium vapour on the external surface of glass, the density of cracks could be visualised and was found to be inversely proportional to the strength of the glass – the more cracks, the lower the strength, and vice versa.
These cracks are a simple result of scratching when the exterior surface comes in contact with other objects. Larger pieces of glass are more likely to develop surface cracks due to the larger surface area. Furthermore, thin glass fibres are much more likely to bend when in contact with other objects, and are therefore less likely to scratch. This means that there is nothing special about thin fibres of glass – if the surface of a thick fibre can be kept just as smooth as that of a thin fibre then it will be just as strong.
This means that an airplane cast from one piece of 100% pristine glass could theoretically sustain all flight loads, such an idea ludicrous in reality, because the likelihood of inducing surface cracks during service is basically 100%.
At this point you might be asking, what is different about metals – why are they used on aircraft instead?
The difference boils down to differences between the atomic structure of glasses and metals. When liquids freeze they typically crystallise into a densely packed array and form a solid that is denser than the liquid. Glasses on the other hand do not arrange themselves into a nicely packed crystalline structure but rather cool into a purely solidified liquid. Glasses can crystallise under some circumstances under a process known as devitrification, but the glass is often weakened as a result. When a solid crystallises, it can deform via a new process in which it starts to flow in shear just like Plasticine or moulding clay does when it is formed.
There is no clear demarcation line between a brittle (think glass) and ductile (think metal) material. The general rule of thumb is that a brittle material does not visibly deform before failure and failure is caused by a single crack that runs smoothly through the entire material. This is why it’s often possible to glue a broken vase back together.
In ductile materials, there is permanent plastic deformation before ultimate failure and so these materials behave more like moulding clay. Before a ductile material, like mild steel, finally snaps in two, there is considerable plastic deformation which can be imagined along the lines of flowing honey or treacle. This plastic flowing is caused by individual layers of atoms sliding over each other, rather than coming apart directly. As this shearing of atomic bonds takes place, the material is not significantly weakened because the atomic bonds have the ability to re-order, and the material may even be strengthened by a process known as cold working (atomic bonds align with the direction of the applied load). The amount of shearing before final failure depends largely on the type of metal alloy and always increases as a metal is heated; hence a blacksmith heats metal before shaping it.
Generally, these two fracture mechanism, brittle cracking and plastic flowing, are always competing in a solid. The material will break in whatever mechanism is weakest; yield before cracking if it is ductile or crack directly if it is brittle.
On December 17 1903, the bicycle mechanic Orville Wright completed the first successful flight in a heavier-than-air machine. A flight that lasted a mere 12 seconds, reaching an altitude of 10 feet and landing 120 feet from the starting point. The Wright Flyer was made of wood and canvas, powered by a 12 horsepower internal combustion engine and endowed with the first, yet basic, mechanisms for controlling pitch, yaw and roll. Only 66 years later, Neil Armstrong walked on the moon, and another 12 years later the first partially re-usable space transportation system, the Space Shuttle, made its way into orbit.
Even though the means of providing lift and attitude control in the Wright Flyer and the Space Shuttle were nearly identical, the operational conditions could not be more different. The Space Shuttle re-entered the atmosphere at orbital velocity of 8 km/s (28x the speed of sound), which meant that the Shuttle literally collided with the atmosphere, creating a hypersonic shock wave with gas temperatures close to 12,000°C -temperature levels hotter than the surface of the sun. How was such unprecedented progress – from Wright Flyer to Space Shuttle – possible in a mere 78 years? This blog post chronicles this technological evolution by telling the story of five iconic aircraft.

The Wright brothers were the first to succesfully fly what we now consider a modern airplane, but as the brothers would adamantly confirm, they did not invent the airplane. Rather, the brothers stood on the shoulders of a century-old keen interest in aeronautical research. The story of the modern airplane goes back to about 100 years before the Wright brothers, to a relatively unknown British scientist, philosopher, engineer and member of parliament, Sir George Cayley. Although Leonardo da Vinci had thought up flying machines 300 years prior to this, his inventions have relatively little in common with modern designs. In 1799 Cayley proposed the first three-part concept that, to this day, represent the fundamental operating principles of flying:
- A fixed wing for creating lift.
- A separate mechanism using paddles to provide propulsion.
- And a cruciform tail for horizontal and vertical stability.
Many of the flying enthusiasts of the 18th century based their designs on the biomimicry of birds, combining lift, propulsive and control functions in a single oversized wing contraption that was insufficient at providing lift, forward propulsion, let alone a means of control. During a decade of intensive study of the aerodynamics of birds and fish from 1799-1810, Cayley constructed a series of rotating airfield apparatuses that tested the lift and drag of different airfoil shapes. In 1852, Cayley published his most famous work “Sir George Cayley’s Governable Parachutes”, which detailed the blueprint of a large glider with almost all of the features we take for granted on a modern aircraft. A prototype of this glider was built in 1853 and flown by Cayley’s coachman, accelerating the prototype off the rooftop of Cayley’s house in Yorkshire.

The distinctive characteristic of the Wright brothers was their incessant persistence and never-ending scepticism of the research conducted by scientists of authority. By single-handedly revising the historic textbook data on airfoils and building all of their inventions themselves, they developed into the most experienced aeronautical engineers of their day. Engineering often requires a certain intuitive knowledge of what works and what doesn’t, typically acquired through first-hand experience, and the Wright brothers had developed this knack in abundance. In this sense, they were best-equipped to refine the concepts of their peers and develop them into something that superseded everything that came before.
One of the most potent signals of British defiance in WWII is the Supermarine Spitfire. In the summer of 1940, during the Battle of Britain, the Spitfire presented the last bulwark between tyranny and democracy. Between July and October 1940, 747 Spitfires were built of which 361 were destroyed and 352 were damaged. Just 34 Spitfires that were built during the summer of 1940 made it through the war unscathed. Unsurprisingly, the Spitfire is one of the most famous airplanes of all time and its aerodynamic beauty of elliptical wings and narrow body make it one of the most iconic aircraft ever built.

The Spitfire was designed by the chief engineer of Supermarine, RJ Mitchell. Before WWII Mitchell led the construction of a series of sea-landing planes that won the Schneider Trophy three times in a row in 1927, 1929 and 1931. The Schneider Trophy was the most important aviation competition between WWI and WWII – initially intended to promote technical advances in civil aviation, it quickly morphed into pure speed contest over a triangular course of around 300 km. As competitions so often do, the Schneider Trophy became an impetus for advancing aeroplane technology, particularly in aerodynamics and engine design. In this regard the Schneider Trophy had a direct impact on many of the best fighters of WWII. The low drag profile and liquid-cooled engine which were pioneered during the Schneider Trophy were all features of the Supermarine Spitfire and the Mustang P-51. The winning airplane in 1931 was the Supermarine S6.B, setting a new airspeed record of 655.8 km/h (407.4 mph). The S6.B was powered by the supercharged Rolls-Royce R engine with 1900 bhp, which presented such insurmountable problems with cooling that surface radiators had to be attached to the buoyancy floats used to land on water. In March 1936, Mitchell evolved the S6.B into the Spitfire with a new Rolls Royce Merlin engine. The Spitfire also featured its radical elliptical wing design which promised to minimise lift-induced drag. Theoretically, an infinitely long wing of constant chord and airfoil section produces no induced drag. A rectangular wing of finite length however produces very strong wingtip vortices and as a result almost all modern wings are tapered towards the tips or fitted with wing tip devices. The advantage of an elliptical planform (tapered but with curved leading and trailing edges) over a tapered trapezoidal planform is that the effective angle of attack of the wing can be kept constant along the entire wingspan. Elliptical wings are probably a remnant of the past as they are much more difficult to manufacture and the benefit over a trapezoidal wing is negligible for the long wing spans of commercial jumbo jets. However, the design will forever live on in one of the most iconic fighters of all time, the Supermarine Spitfire.
Captain Chuck Yeager, an American WWII fighter ace, became the first supersonic pilot in 1947 when the chief test pilot for the Bell Corporation refused to fly the rocket-powered Bell X-1 experimental aircraft without any additional danger pay. The X-1 closely resembled a large bullet with short stubby wings for higher structural efficiency and less drag at higher speeds. The X-1 was strapped to the belly of a B-29 bomber and then dropped at 20,000 feet, at which point Yeager fired his rocket motors propelling the aircraft to Mach 0.85 as it climbed to 40,000 feet. Here Yeager fully opened the throttle, pushing the aircraft into a flow regime for which there was no available wind tunnel data, ultimately reaching a new airspeed record of Mach 1.06. Yeager had just achieved something that had eluded Europe’s aircraft engineers through all of WWII.
.jpg)
The limit that the European aircraft designer ran into during the air speed competitions prior to WWII was the sound barrier. The problem of flying faster, or in fact approaching the speed of sound, is that shock waves start to form at certain locations over the aircraft fuselage. A shock wave is a thin front (about 10 micrometers thick) in which molecules are squashed together by such a degree that it is energetically favourable to induce a sudden increase in the fluid’s density, temperature and pressure. As an aircraft approaches the speed of sound, small pockets of sonic or supersonic flow develop on the top surface of the wing due to airflow acceleration over the curved upper skin. These supersonic pockets terminate in a shockwave, drastically slowing the airflow and increasing the fluid pressure. Even in the absence of shock waves the airflow runs into an adverse pressure gradient towards the trailing edge of the wing, slowing the airflow and threatening to separate the boundary layer from the wing. This condition drastically increases the induced drag and reduces lift, which in the worst case can lead to aerodynamic stall. In the presence of a shock wave this scenario is exacerbated by the sudden increase in pressure and drop in airflow velocity across the shock wave. For this precise reason, commercial aircraft are limited to speeds of around Mach 0.87-0.88 as any further increase in speed would induce shock waves over the wings, increasing drag and requiring an unproportional amount of additional engine power.
It was precisely this problem that aircraft designers ran into in the 1930’s and 1940’s. To make their airplanes approach the speed of sound they needed incredible amounts of extra power, which the internal combustion engines of the time could not provide. Quite fittingly this seemingly insurmountable speed limit was dubbed the sound barrier. It was not until the advent of refined jet engines after WWII that the sound barrier was broken. However, exceeding the sound barrier does not mean things get any easier. The ratio of upstream to downstream airflow speed and pressure across a shock wave are simple functions of the upstream Mach number (airspeed / local speed of sound). Unfortunately for aircraft designers, these ratios change with the square of the upstream Mach number, which means that the induced drag becomes worse and worse the further the speed of sound is exceeded. This is why the Concorde needed such powerful engines and why its fuel costs were so exorbitant.
The North American X-15 rocket plane was one of NASA’s most daring experimental aircraft intended to test flight conditions at hypersonic speeds (Mach 5+) at the edge of space. Three X-15s made 199 flights from 1960-1968 and the data collected and knowledge gained directly impacted the design of the Space Shuttle. Initially designed for speeds up to Mach 6 and altitudes up to 250,000 feet, the X-15 ultimately reached a top speed of Mach 6.72 (more than one mile a second) and a maximum altitude of 354,200 feet (beyond the official demarcation line of space). As of this writing, the X-15 still holds the world record for the highest speed recorded by a manned aircraft. Given the awesome power required to overcome the induced drag of flying at these velocities, it is no surprise that the X-15 was not powered by a traditional turbojet engine but rather a full-fledged liquid-propellant rocket engine, gulping down 2,000 pounds of ethyl alcohol and liquid oxygen every 10 seconds.

The X-15 was dropped from a converted B-52 bomber and then made its way on one of two different experimental flight profiles. High-speed flights were conducted at an altitude of a typical commercial jetliner (below 100,000 feet) using conventional aerodynamic control surfaces. For high-altitude flights the X-15 initiated a steep climb at full throttle, followed by engine shut-down once the aircraft left Earth’s atmosphere. What followed was a ballistic coast, carrying the aircraft up to the peak of an arc and then plummeting back to Earth. Beyond Earth’s atmosphere the aerodynamic control surfaces of the X-15 were obviously useless, and so the X-15 relied on small rocket thrusters for control.
The hypersonic speeds beyond the conventional sound barrier discussed previously created a new problem for the X-15. In any medium, sound is transmitted by vibrations of the medium’s molecules. As an aircraft slices through the air, it disturbs the molecules around it which ensues in a pressure wave as molecules bump into adjacent molecules, sequentially passing on the disturbance. Flying faster than the speed of sound means that the aircraft is moving faster than this pressure wave. Put another way, the air molecules are transmitting the information of the disturbance created by the aircraft via a pressure wave that travels at the speed of sound. While the aircraft is creating new disturbances further upstream, Nature can’t keep up with the aircraft. At hypersonic speeds the aircraft is literally smashing into the surrounding stationary air molecules, and the ensuing compression of the air around the aircraft skin leads to fluid temperatures that are above the melting point of steel. Hence, one of the major challenges of the X-15 was guaranteeing structural integrity at these incredibly high temperatures. As a result, the X-15 was constructed from Inconel X, a high-temperature nickel alloy, which is also used in the very hot turbine stages of a jet-engine.
The wedge tail visible at the back of the aircraft was also specifically required to guarantee attitude stability of the aircraft at hypersonic speeds. At lower speeds this thick wedge created considerable amounts of drag, in fact as much as some individual fighter aircraft alone. The area of the tail wedge was around 60% of the entire wing area and additional side panels could be extended out to further increase the overall surface area.
12 April 1981 marked a new era in manned spaceflight: Space Shuttle Columbia lifted off for the first time from Cape Canaveral. The Shuttle capped an incredible fruitful period in aerospace engineering development. The ground work laid by the original Wright flyer, the Spitfire, the X-1 and the X-15 is all part of the technological arc that led to the Shuttle. The fundamentals didn’t change but their orders of magnitude did.
“Like bolting a butterfly onto a bullet” — Story Musgrave, Columbia astronaut, 1996
Story Musgrave’s description of the Space Shuttle is not far off the mark. On the launch pad the Shuttle sat on two solid-rocket boosters producing 37 million horsepower, accelerating the Shuttle beyond the speed of sound in about 30 seconds. Eight minutes and 500,000 gallons of fuel later the Shuttle was travelling at 17,500 mph at the edge of space. The Space Shuttle was not only powerful but possessed a grace that the Wright brothers would have appreciated. After smashing through the atmosphere upon reentry at Mach 28 (8 km/s) the piloting astronaut had to slow the Shuttle down to 200 mph via a series of gliding twists and turns, using the surrounding air as an aerodynamic break.

The ultimate mission of the Shuttle was to serve as a cost-effective means of travelling to space for professional astronauts and civilians. That vision never came to fruition due to the high maintenance costs between flights, and partly due the Challenger and Columbia disasters that shattered all hopes that space travel would become routine.
Perhaps the Space Shuttle is one of humanities greatest inventions because it reminds us that for all its power, grace and genius it is still the brainchild of fallible men.
Edits:
A previous version of this article incorrectly stated that the Space Shuttle featured three solid rocket boosters (SRBs). Of course, the Space Shuttle only featured two.
After Germany and its allies lost WWI, motor flying became strictly prohibited under the Treaty of Versailles. Creativity often springs from constraints, and so, paradoxically, the ban imposed by the Allies encouraged precisely what they had actually wanted to thwart: the growth of the German aviation industry. As all military flying was prohibited under the Treaty, the innovation in German aviation throughout the 1920’s took an unlikely path via unmotorised gliders built by student associations at universities.
Before and during WWI, Germany had been one of the leading countries in terms of the theoretical development of aviation and the actual construction of novel aircraft. The famous aerodynamicist Ludwig Prandtl and his colleagues developed the theory of the boundary layer which later led to wing theory. The close relationship of research laboratories and industrial magnates, like Fokker and Junkers, meant that many of the novel ideas of the day were tested on actual aircraft during WWI. Part of the reason why Baron von Richthofen, the Red Baron, became the most decorated fighter pilot of his day, was because his equipment was more technologically advanced than that of his opponents; a direct result of a thicker cambered wing that Prandtl had tested in his wind tunnels.
Given this heritage, it comes to no surprise that German students and professors soon found a way around the ban imposed at the Treaty of Versailles. For example, a number of enthusiastic students from the University of Aachen formed the Flugwissenschaftliche Vereinigung Aachen (FVA, Aachen Association for Aeronautical Sciences). These students loved the art and science of flying and intended to continue their passion despite the ban. Theodore von Kármán, of vortex street and Tacoma Narrows bridge fame, was a professor at the Technical University of Aachen at the time and remembers the episode as follows:
One day an FVA member approached me with a bright idea.
“Herr Professor,“ he said. “We would like your help. We wish to build a glider.”
“A glider? Why do you wish to build a glider?”
“For sport.” the student said.
I thought it over. Constructing a glider would be more than sport. It would be an interesting and useful aerodynamic project, quite in keeping with German traditions, but in view of postwar turmoil it could be politically quite risky … On the other hand, motorised flight was specifically outlawed in the Treaty of Versailles, and sport flying was not military flying. So rationalizing in this way, I told the boys to go ahead.
What von Kármán was not aware of at the time was that he was helping to lay the foundation for an important part of the German air force during WWII. The lessons learned in improving glider design would be directly applicable to military aeronautics later on.
Glider development in itself is a topic worth studying. The French sailor Le Bris constructed a functional glider in 1870, but the most famous gliders of the 19th century were all built by Otto Lilienthal. Lilienthal became the first aviator to realise the superiority of curved wings over flat surfaces for providing lift. Lilienthal conducted some rudimentary wing testing to tabulate the air pressure and lift for different wing sections; data which inspired, but was then superseded by the Wright brothers’ experiments using their own wind tunnel. In the USA, Octave Chanute is famous for his work on gliders and for many years he served as a direct mentor to the Wright brothers, who themselves built a number of successful gliders to optimise wing shapes and control mechanisms.
After the first successful motor-powered flight in 1903, interest in gliders largely subsided, but was then revived by collegiate sporting competitions organised by German universities. Oskar Ursinus, the editor of the aeronautics journal Flugsport (Sport Flying), organised an intercollegiate gliding competition in the Rhön mountains, a spot renowned for its strong upwinds. So work began behind closed doors in many university labs and sheds. Von Kármán’s school, the University of Aachen, built a 6 m (20 foot) wing-span glider called the Black Devil, which was the first cantilever monoplane glider to be built at the time. As a result of the cantilever wing construction, the design abandoned any form of wire bracing to stabilise the wing and relied purely on internal wing bracing, as had been pioneered by Junkers in 1915. In this regard, the glider was already more advanced than most of the fighters in WWI that were based on the classical bi-plane or even trip-plane design held together by wires and struts.

The Black Devil sailplane, designed by Wolfgang Klemperer
By early 1920 the Black Devil was ready to compete. At this point the students faced a new logistical challenge — how were they going to transport the glider a 150 miles south through three military zones (British, French and American), when shipping aircraft components was strictly forbidden?
As reckless students they of course operated in secret. The Black Devil was dismantled into its components, packed into a tarpaulin freight car and then driven through the night. Of this episode von Kármán recounts that,
On one occasion during the journey we almost lost the Black Devil to a contingent of Allied troops. Fortunately the engineer and student guard received advance notice of the movement, disengaged the car holding the glider, and silently transferred it to a dark sliding until the troops rode past.
Overall, the trip took six hours and the teams from Stuttgart, Göttingen and Berlin were already in attendance.
Lacking any motorised aircraft to launch the gliders, two rubber ropes were attached to the nose of the glider and then used as a catapult to launch the glider off the edge of a hill. Once in the air, it was the role of the pilot to manoeuvre the plane purely by shifting his/her body weight to balance the glider in the wind. In 1920, Aachen managed to win the competition with a flight time of 2 minutes and 20 seconds. Not a new revolution in glider design, but proving the aerodynamics of their concept plane nevertheless. A year later, an improved version of the Black Devil, the Blue Mouse, flew for 13 minutes, breaking the long-held record by Orville Wright of 9 minutes and 45 seconds. Some great videos of the early flights at the Wasserkuppe in the Rhön mountains exist to this day.

The Blue Mouse glider flying at the Wasserkuppe in the Rhön mountains.
In the following years, von Kármán and his scientific mentor and aerodynamics pioneer Ludwig Prandtl gave a series of seminars on the aerodynamics of gliding, which were attended by students and flying enthusiasts from all over the country. Among the attendees was Willy Messerschmitt, an engineering student at the time, whose fighters and bombers later formed the core of the Nazi air force during WWII. Even established industrialists, German royalty and other university professors attended the talks. As a result of this broad and democratic dissemination of knowledge and the collaborative spirit at the time, innovations began to sprout quickly. One of the main innovations was efficiently using thermal updrafts in combination with topological updrafts to extend the flying time. In 1922, a collaborative design team from the University of Hannover built the Hannover H 1 Vampyre glider, which first extended the gliding record to 3 hours and then to 6 hours in 1923. The Vampyr was one of the first heavier-than-air aircraft to use the stressed-skin “monocoque” design philosophy and is the forerunner of all modern gliders.

The Vampyr glider. One of the first aircraft ever to use the stresses skin”monocoque” concept.
On the importance of glider developments von Kármán reflects that,
I have always thought that the Allies were shortsighted when they banned motor flying in Germany … Experiments with gliders in sport sharpened German thinking in aerodynamics, structural design, and meteorology … In structural design gliders showed how best to distribute weight in a light structure and revealed new facts about vibration. In meteorology we learned from gliders how planes could use the jet stream to increase speed; we uncovered the dangers of hidden turbulence in the air, and in general opened up the study of meteorological influences on aviation. It is interesting to note that glider flying did more to advance the science of aviation than most of the motorised flying in World War I.
We can only speculate how von Kármán must have felt after leaving Germany in the 1930’s, partly due to his Jewish heritage, and witness from afar how the machines he helped to develop wreaked havoc in Europe during WWII.
References
The quotes in this post are taken from von Kármán’s excellent biography The Wind and Beyond: Theodore von Karman, Pioneer in Aviation and Pathfinder in Space by Theodore von Kármán and Lee Edson.
On November 8, 1940 newspapers across America opened with the headline “TACOMA NARROWS BRIDGE COLLAPSES”. The headline caught the eye of a prominent engineering professor who, from reading the news story, intuitively realised that a specific aerodynamical phenomenon must have led to the collapse. He was correct, and became publicly famous for what is now known as the von Kármán vortex street.
Theodore von Kármán was one of the most pre-eminent aeronautical engineers of the 20th century. Born and raised in Budapest, Hungary he was a member of a club of 20th century Hungarian scientists, including mathematician and computer scientist John von Neumann and nuclear physicist Edward Teller, who made groundbreaking strides in their respective fields. Von Kármán was a PhD student of Ludwig Prandtl at the University of Göttingen, the leading aerodynamics institute in the world at the time and home to many great German scientists and mathematicians.
.jpg)
Theodore von Kármán jotting down a plan on a wing before a rocket-powered aircraft test
Furthermore, von Kármán developed an unusual expertise in building wind tunnels — a suitable had not originally exist when he first started his professorship in Aachen and was desperately needed for his research. As a result, he became a sought after expert in designing and overseeing the construction of wind tunnels in the USA and Japan. Von Kármán’s broad skill set and unique combination of theoretical and experimental expertise soon placed him on the radar of physicist Robert Millikan who was setting up a new technical university in Pasadena, California, the California Institute of Technology. Millikan believed that the year-round temperate climate would attract all of the major aircraft companies of the bourgeoning aerospace industry to Southern California, and he hired von Kármán to head CalTech’s aerospace institute. Millikan’s wager paid off when companies such as Northrup, Lockheed, Douglas and Consolidated Aircraft (later Convair) all settled in the greater Los Angeles area. Von Kármán thus became a consultant on iconic aircraft such as the Douglas DC-3, the Northrup Flying Wing, and later the rockets developed by NACA (now NASA).
Von Kármán is renowned for many concepts in structural mechanics and aerodynamics, e.g. the non-linear behaviour of cylinder buckling and a mathematical theory describing turbulent boundary layers. His most well-known piece of work, the von Kármán vortex street, tragically, reached public notoriety after it explained the collapse of a suspension bridge over the Puget Sound in 1940.
The von Kármán vortex street is a direct result of boundary layer separation over bluff bodies. Immersed in fluid flow, any body of finite thickness will force the surrounding fluid to flow in curved streamlines around it. Towards the leading edge this causes the flow to speed up in order to balance the centripetal forces created by the curved streamlines. This creates a region of falling fluid pressure, also called a favourable pressure gradient. Further along the body, where the streamlines straighten out, the opposite occurs and the fluid flows into a region of rising pressure, an adverse pressure gradient. The increasing pressure gradient pushes against the flow and causes the slowest parts of the flow, those immediately adjacent to the surface, to reverse direction. At this point the boundary layer has separated from the body and the combination of flow in two directions induces a wake of turbulent vortices (see diagram below).
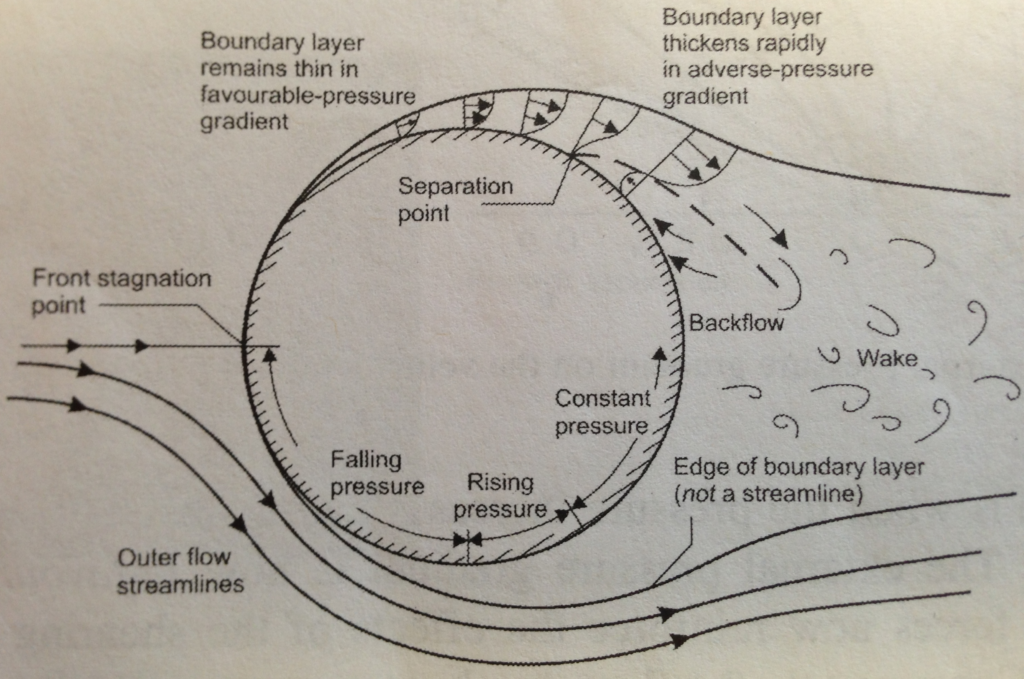
Boundary layer separation over cylinder
The type of flow in the wake depends on the Reynolds number of the flow impinging on the body,

where 




Flow around a cylinder for different Reynolds numbers
For example, consider the flow past an infinitely long cylinder protruding out of your screen (as shown in the figure above). For very low Reynolds number flow (Re < 10) the inertial forces are negligible and the streamlines connect smoothly behind the cylinder. As the Reynolds number is increased into the range of Re = 10-40 (by, for example, increasing the free stream velocity

This condition of alternately shedding vortices from the sides of the cylinder is known as the von Kármán vortex street. At a certain distance from the cylinder the behaviour obviously dissipates, but close to the cylinder the oscillatory shedding can have profound aeroelastic effects on the structure. Aeroelasticity is the study of how fluid flow and structures interact dynamically. For example, there are two very important locations on an aircraft wing:
– the centre of pressure, i.e. an idealised point of the wing where the lift can be assumed to act as a point load
– the shear centre, i.e. the point of any structural cross-section through which a point load must act to cause pure bending and no twisting
The problem is that the centre of pressure and shear centre are very rarely coincident, and so the aerodynamic lift forces will typically not only bend a wing but also cause it to twist. Twisting in a manner that forces the leading edge upwards increases the angle of attack and thereby increases the lift force. This increased lift force produces more twisting, which produces more lift, and so on. This phenomenon is known as divergence and can cause a wing to twist-off the fuselage.
A different, yet equally pernicious, aeroelastic instability can occur as a result of the von Kármán vortex street. Each time an eddy is shed from the cylinder, the symmetry of the flow pattern is broken and a difference in pressure is induced between the two sides of the cylinder. The vortex shedding therefore produces alternating sideways forces that can cause sideways oscillations. If the frequency of these oscillations is the same as the natural frequency of the cylinder, then the cylinder will undergo resonant behaviour and start vibrating uncontrollably.
So, how does this relate to the fated Tacoma Narrows bridge?
Upon completion, the first Tacoma Narrows suspension bridge, costing $6.4 mill and the third longest bridge of its kind, was described as the fanciest single span bridge in the world. With its narrow towers and thin stiffening trusses the bridge was valued for its grace and slenderness. On the morning of November 7, 1940, only a year into its service, the bridge broke apart in a light gale and crashed into the Puget Sound 190 feet below. From its inaugural day on July 1, 1940 something seemed not quite right. The span of the bridge would start to undulate up and down in light breezes, securing the bridge the nickname “Galloping Gertie”. Engineers tried to stabilise the bridge using heavy steel cables fixed to steel blocks on either side of the span. But to no avail, the galloping continued.
On the morning of the collapse, Gertie was bouncing around in its usual manner. As the winds started to intensify to 60 kmh (40 mph) the rhythmic up and down motion of the bridge suddenly morphed into a violent twisting motion spiralling along the deck. At this point the authorities closed the bridge to any further traffic but the bridge continued to writhe like a corkscrew. The twisting became so violent that the sides of the bridge deck separated by 9 m (28 feet) with the bridge deck oriented at 45° to the horizontal. For half an hour the bridge resisted these oscillatory stresses until at one point the deck of the bridge buckled, girders and steel cables broke loose and the bridge collapsed into the Puget Sound.
After the collapse, the Governor of Washington, Clarence Martin, announced that the bridge had been built correctly and that another one would be built using the same basic design. At this point von Kármán started to feel uneasy and he asked technicians at CalTech to build a small rubber replica of the bridge for him. Von Kármán then tested the bridge at home using a small electric fan. As he varied the speed of the fan, the model started to oscillate, and these oscillations grew greater as the rhythm of the air movement induced by the fan was synchronised with the oscillations.
Indeed, Galloping Gertie had been constructed using cylindrical cable stays and these shed vortices in a periodic manner when a cross-wind reached a specific intensity. Because the bridge was also built using a solid sidewall, the vortices impinged immediately onto a solid section of the bridge, inducing resonant vibrations in the bridge structure.
Von Kármán then contacted the governor and wrote a short piece for the Engineering News Record describing his findings. Later, von Kármán served on the committee that investigated the cause of the collapse and to his surprise the civil engineers were not at all enamoured with his explanation. In all of the engineers’ training and previous engineering experience, the design of bridges had been governed by “static forces” of gravity and constant maximum wind load. The effects of “dynamic loads”, which caused bridges to swing from side to side, had been observed but considered to be negligible. Such design flaws, stemming from ignorance rather than the improper application of design principles, are the most harrowing as the mode of failure is entirely unaccounted for. Fortunately, the meetings adjourned with agreements in place to test the new Tacoma Narrows bridge in a wind tunnel at CalTech, a first at the time. As a result of this work, the solid sidewall of the bridge deck was perforated with holes to prevent vortex shedding, and a number of slots were inserted into the bridge deck to prevent differences in pressure between the top and bottom surfaces of the deck.
The one person that did suffer irrefutable damage to his reputation was the insurance agent that initially underwrote the $6 mill insurance policy for the state of Washington. Figuring that something as big as the Tacoma Narrows bridge would never collapse, he pocketed the insurance premium himself without actually setting up a policy, and ended up in jail…
If you would like to learn more about Theodore von Kármán’s life, I highly recommend his autobiography, which I have reviewed here.
The material we covered in the last two posts (skin friction and pressure drag) allows us to consider a fun little problem:
How quickly do the small bubbles of gas rise in a pint of beer?
To answer this question we will use the concept of aerodynamic drag introduced in the last two posts – namely,
- skin friction drag – frictional forces acting tangential to the flow that arise because of the inherent stickiness (viscosity) of the fluid.
- pressure drag – the difference between the fluid pressure upstream and downstream of the body, which typically occurs because of boundary layer separation and the induced turbulent wake behind the body.
The most important thing to remember is that both skin friction drag and profile drag are influenced by the shape of the boundary layer.
What is this boundary layer?
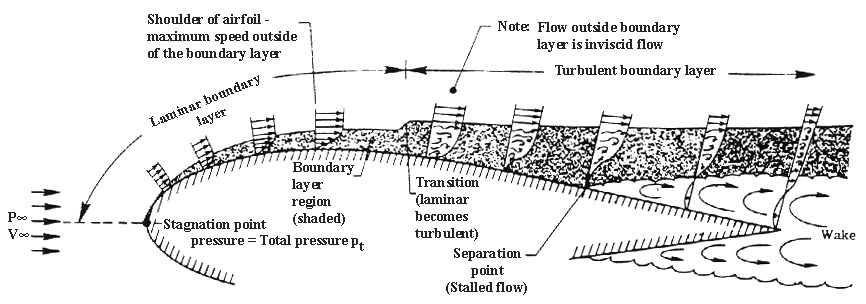
As a fluid flows over a body it sticks to the body’s external surface due to the inherent viscosity of the fluid, and therefore a thin region exists close to the surface where the velocity of the fluid increases from zero to the mainstream velocity. This thin region of the flow is known as the boundary layer and the velocity profile in this region is U-shaped as shown in the figure below.
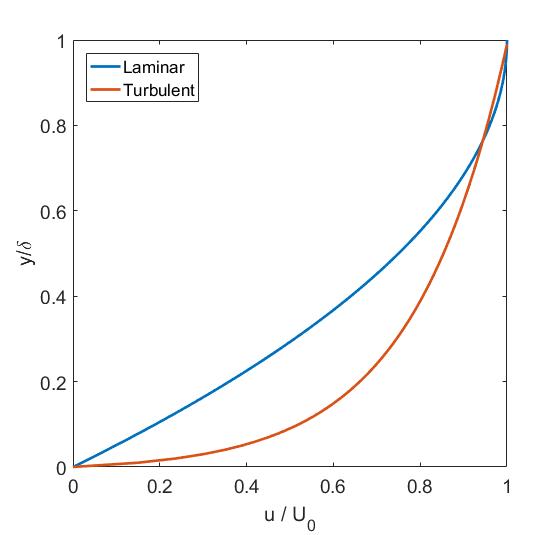
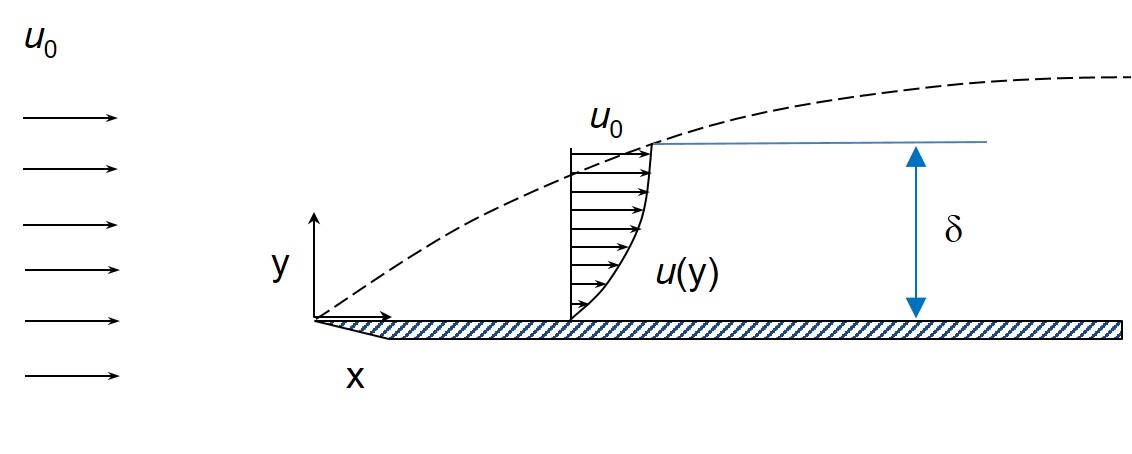
Velocity profile of laminar versus turbulent boundary layer
As shown in the figure above, the flow in the boundary layer can either be laminar, meaning it flows in stratified layers with no to very little mixing between the layers, or turbulent, meaning there is significant mixing of the flow perpendicular to the surface. Due to the higher degree of momentum transfer between fluid layers in a turbulent boundary layer, the velocity of the flow increases more quickly away from the surface than in a laminar boundary layer. The magnitude of skin friction drag at the surface of the body (y = 0 in the figure above) is given by

where 
Skin friction drag is the dominant form of drag for objects whose surface area is aligned with the flow direction. Such shapes are called streamlined and include aircraft wings at cruise, fish and low-drag sports cars. For these streamlined bodies it is beneficial to maintain laminar flow over as much of the body as possible in order to minimise aerodynamic drag.
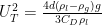
Conversely, pressure drag is the difference between the fluid pressure in front of (upstream) and behind (downstream) the moving body. Right at the tip of any moving body, the fluid comes to a standstill relative to the body (i.e. it sticks to the leading point) and as a result obtains its stagnation pressure.
The stagnation pressure is the pressure of a fluid at rest and, for thermodynamic reasons, this is the highest possible pressure the fluid can obtain under a set of pre-defined conditions. This is why from Bernoulli’s law we know that fluid pressure decreases/increases as the fluid accelerates/decelerates, respectively.
At the trailing edge of the body (i.e. immediately behind it) the pressure of the fluid is naturally lower than this stagnation pressure because the fluid is either flowing smoothly at some finite velocity, hence lower pressure, or is greatly disturbed by large-scale eddies. These large-scale eddies occur due to a phenomenon called boundary layer separation.
Boundary layer separation over a cylinder
Why does the boundary layer separate?
Any body of finite thickness will force the fluid to flow in curved streamlines around it. Towards the leading edge this causes the flow to speed up in order to balance the centripetal forces created by the curved streamlines. This creates a region of falling fluid pressure, also called a favourable pressure gradient. Further along the body, the streamlines straighten out and the opposite phenomenon occurs – the fluid flows into a region of rising pressure, also known as an adverse pressure gradient. This adverse pressure gradient decelerates the flow and causes the slowest parts of the boundary layer, i.e. those parts closest to the surface, to reverse direction. At this point, the boundary layer “separates” from the body and the combination of flow in two directions induces a wake of turbulent vortices; in essence a region of low-pressure fluid.
The reason why this is detrimental for drag is because we now have a lower pressure region behind the body than in front of it, and this pressure difference results in a force that pushes against the direction of travel. The magnitude of this drag force greatly depends on the location of the boundary layer separation point. The further upstream this point, the higher the pressure drag.
To minimise pressure drag it is beneficial to have a turbulent boundary layer. This is because the higher velocity gradient at the external surface of the body in a turbulent boundary layer means that the fluid has more momentum to “fight” the adverse pressure gradient. This extra momentum pushes the point of separation further downstream. Pressure drag is typically the dominant type of drag for bluff bodies, such as golf balls, whose surface area is predominantly perpendicular to the flow direction.
So to summarise: laminar flow minimises skin-friction drag, but turbulent flow minimises pressure drag.
Given this trade-off between skin friction drag and pressure drag, we are of course interested in the total amount of drag, known as the profile drag. The propensity of a specific shape in inducing profile drag is captured in the dimensionless drag coefficient

where 


The denominator of the drag coefficient represents the dynamic pressure of the fluid (


Skin friction drag versus pressure drag for differently shaped bodies
Looking at the diagram above we can start to develop an appreciation for the relative magnitude of pressure drag and skin friction drag for different bodies. The “worst” shape for boundary layer separation is a plate perpendicular to the flow as shown in the first diagram. In this case, drag is clearly dominated by pressure drag with negligible skin friction drag. The situation is similar for the cylinder shown in the second diagram, but in this case the overall profile drag is smaller due to the greater degree of streamlining.
The degree of boundary layer separation, and therefore the wake of eddies behind the cylinder, depends to a large extent on the surface roughness of the body and the Reynolds number of the flow. The Reynolds number is given by

where 
This influence of Reynolds number can be observed by comparing the second diagram to the bottom diagram. The flow over the cylinder in the bottom diagram has increased by a factor of 100 (


Notice also that the streamlined aircraft wing shown in the third diagram has a much lower drag coefficient. This is because the aircraft wing is essentially a “drawn-out” cylinder of the same “thickness”
Terminal velocity of rising beer bubbles
The terminal velocity is the speed at which the forces accelerating a body equal those decelerating it. For example, the aerodynamic drag acting on a sky diver is proportional to the square of his/her falling velocity. This means that at some point the sky diver reaches a velocity at which the drag force equals the force of gravity, and the sky diver cannot accelerate any further. Hence, the terminal velocity represents the velocity at which the forces accelerating a body are equal to those decelerating it.

Beer bubbles rising to the surface

Turbulent wake behind a moving sphere. We will model the gas bubbles rising to the top of beer as a sphere moving through a liquid
The net accelerating force of a bubble of air/gas in a liquid is the buoyancy force, i.e. the difference in density between the liquid and the gas. This buoyancy force 

where 




At terminal velocity the buoyancy force is balanced by the total drag acting on the gas bubble. Using the equation for the drag coefficient above we know that the total drag 

where 



and re-arranging for terminal velocity gives us
At this point we can calculate the terminal velocity of a spherical gas bubble driven by buoyancy forces for a certain drag coefficient. The problem now is that the drag coefficient of a sphere is not constant; it changes with the flow velocity. Fortunately, the drag coefficient of a sphere plateaus at around 0.5 for Reynolds numbers 

Drag coefficient as a function of Reynolds number. The curve flattens out between 10^3 and 10^5.
 and density of the fluid equal to
and density of the fluid equal to  (5% volume beer).
(5% volume beer).
Therefore, the terminal velocity of gas bubbles rising in a beer are somewhere in the range of

and taking the square root

Given that the viscosity of the fluid is around 

which is right at the bottom of R =
So there you have it: Beer bubbles rise at around a foot per second.
Perhaps the next time you gaze pensively into a glass of beer after a hard day’s work, this little fun-fact will give you something else to think (or smile) about.
Acknowledgements
This post is based on a fun little problem that Prof. Gary Lock set his undergraduate students at the University of Bath. Prof. Lock was probably the most entertaining and effective lecturer I had during my undergraduate studies and has influenced my own lecturing style. If I can only pass on a fraction of the passion for engineering and teaching that Prof. Lock instilled in me, I consider my job well done.
At the start of the 19th century, after studying the highly cambered thin wings of many different birds, Sir George Cayley designed and built the first modern aerofoil, later used on a hand-launched glider. This biomimetic, highly cambered and thin-walled design remained the predominant aerofoil shape for almost 100 years, mainly due to the fact that the actual mechanisms of lift and drag were not understood scientifically but were explored in an empirical fashion. One of the major problems with these early aerofoil designs was that they experienced a phenomenon now known as boundary layer separation at very low angles of attack. This significantly limited the amount of lift that could be created by the wings and meant that bigger and bigger wings were needed to allow for any progress in terms of aircraft size. Lacking the analytical tools to study this problem, aerodynamicists continued to advocate thin aerofoil sections, as there was plenty of evidence in nature to suggest their efficacy. The problem was considered to be more one of degree, i.e. incrementally iterating the aerofoil shapes found in nature, rather than of type, that is designing an entirely new shape of aerofoil in accord with fundamental physics.
During the pre-WWI era, the misguided notions of designers was compounded by the ever-increasing use of wind-tunnel tests. The wind tunnels used at the time were relatively small and ran at very low flow speeds. This meant that the performance of the aerofoils was being tested under the conditions of laminar flow (smooth flow in layers, no mixing perpendicular to flow direction) rather than the turbulent flow (mixing of flow via small vortices) present over the wing surfaces. Under laminar flow conditions, increasing the thickness of an aerofoil increases the amount of skin-friction drag (as shown in last month’s post), and hence thinner aerofoils were considered to be superior.
The modern plane – born in 1915
The situation in Germany changed dramatically during WWI. In 1915 Hugo Junkers pioneered the first practical all-metal aircraft with a cantilevered wing – essentially the same semi-monocoque wing box design used today. The most popular design up to then was the biplane configuration held together by wires and struts, which introduced considerable amounts of parasitic drag and thereby limited the maximum speed of aircraft. Eliminating these supporting struts and wires meant that the flight loads needed to be carried by other means. Junkers cantilevered a beam from either side of the fuselage, the main spar, at about 25% of the chord of the wing to resist the up and down bending loads produced by lift. Then he fitted a smaller second spar, known as the trailing edge spar, at 75% of the chord to assist the main spar in resisting fore and aft bending induced by the drag on the wing. The two spars were connected by the external wing skin to produce a closed box-section known as the wing box. Finally, a curved piece of metal was fitted to the front of the wing to form the “D”-shaped leading edge, and two pieces of metal were run out to form the trailing edge. This series of three closed sections provided the wing with sufficient torsional rigidity to sustain the twisting loads that arise because the centre of pressure (the point where the lift force can be considered to act) is offset from the shear centre (the point where a vertical load will only cause bending and no twisting). Junker’s ideas were all combined in the world’s first practical all-metal aircraft, the Junker J 1, which although much heavier than other aircraft at the time, developed into the predominant form of construction for the larger and faster aircraft of the coming generation.

Junkers J 1 at Döberitz in 1915
Junkers construction naturally resulted in a much thicker wing due to the room required for internal bracing, and this design provided the impetus for novel aerodynamics research. Junker’s ideas were supported by Ludwig Prandtl who carried out his famous aerodynamics work at the University of Göttingen. As discussed in last month’s post, Prandtl had previously introduced the notion of the boundary layer; namely the existence of a U-shaped velocity profile with a no-flow condition at the surface and an increasing velocity field towards the main stream some distance away from the surface. Prandtl argued that the presence of a boundary layer supported the simplifying assumption that fluid flow can be split into two non-interacting portions; a thin layer close to the surface governed by viscosity (the stickiness of the fluid) and an inviscid mainstream. This allowed Prandtl and his colleagues to make much more accurate predictions of the lift and drag performance of specific wing-shapes and greatly helped in the design of German WWI aircraft. In 1917 Prandtl showed that Junker’s thick and less-cambered aerofoil section produced much more favourable lift characteristics than the classic thinner sections used by Germany’s enemies. Second, the thick aerofoil could be flown at a much higher angle of attack without stalling and hence improved the manoeuvrability of a plane during dog fighting.
Skin Friction versus Pressure Drag
The flow in a boundary layer can be either laminar or turbulent. Laminar flow is orderly and stratified without interchange of fluid particles between individual layers, whereas in turbulent flow there is significant exchange of fluid perpendicular to the flow direction. The type of flow greatly influences the physics of the boundary layer. For example, due to the greater extent of mass interchange, a turbulent boundary layer is thicker than a laminar one and also features a steeper velocity gradient close to the surface, i.e. the flow speed increases more quickly as we move away from the wall.
Velocity profile of laminar versus turbulent boundary layer. Note how the turbulent flow increases velocity more rapidly away from the wall.
Just like your hand experiences friction when sliding over a surface, so do layers of fluid in the boundary layer, i.e. the slower regions of the flow are holding back the faster regions. This means that the velocity gradient throughout the boundary layer gives rise to internal shear stresses that are akin to friction acting on a surface. This type of friction is aptly called skin-friction drag and is predominant in streamlined flows where the majority of the body’s surface is aligned with the flow. As the velocity gradient at the surface is greater for turbulent than laminar flow, a streamlined body experiences more drag when the boundary layer flow over its surfaces is turbulent. A typical example of a streamlined body is an aircraft wing at cruise, and hence it is no surprise that maintaining laminar flow over aircraft wings is an ongoing research topic.
Over flat surfaces we can suitably ignore any changes in pressure in the flow direction. Under these conditions, the boundary layer remains stable but grows in thickness in the flow direction. This is, of course, an idealised scenario and in real-world applications, such as curved wings, the flow is most likely experiencing an adverse pressure gradient, i.e. the pressure increases in the flow direction. Under these conditions the boundary layer can become unstable and separate from the surface. The boundary layer separation induces a second type of drag, known as pressure drag. This type of drag is predominant for non-streamlined bodies, e.g. a golfball flying through the air or an aircraft wing at a high angle of attack.
So why does the flow separate in the first place?
To answer this question consider fluid flow over a cylinder. Right at the front of the cylinder fluid particles must come to rest. This point is aptly called the stagnation point and is the point of maximum pressure (to conserve energy the pressure needs to fall as fluid velocity increases, and vice versa). Further downstream, the curvature of the cylinder causes the flow lines to curve, and in order to equilibrate the centripetal forces, the flow accelerates and the fluid pressure drops. Hence, an area of accelerating flow and falling pressure occurs between the stagnation point and the poles of the cylinder. Once the flow passes the poles, the curvature of the cylinder is less effective at directing the flow in curved streamlines due to all the open space downstream of the cylinder. Hence, the curvature in the flow reduces and the flow slows down, turning the previously favourable pressure gradient into an adverse pressure gradient of rising pressure.
Boundary layer separation over a cylinder (axis out out the page).
To understand boundary layer separation we need to understand how these favourable and adverse pressure gradients influence the shape of the boundary layer. From our discussion on boundary layers, we know that the fluid travels slower the closer we are to the surface due to the retarding action of the no-slip condition at the wall. In a favourable pressure gradient, the falling pressure along the streamlines helps to urge the fluid along, thereby overcoming some of the decelerating effects of the fluid’s viscosity. As a result, the fluid is not decelerated as much close to the wall leading to a fuller U-shaped velocity profile, and the boundary layer grows more slowly.
By analogy, the opposite occurs for an adverse pressure gradient, i.e. the mainstream pressure increases in the flow direction retarding the flow in the boundary layer. So in the case of an adverse pressure gradient the pressure forces reinforce the retarding viscous friction forces close to the surface. As a result, the difference between the flow velocity close to the wall and the mainstream is more pronounced and the boundary layer grows more quickly. If the adverse pressure gradient acts over a sufficiently extended distance, the deceleration in the flow will be sufficient to reverse the direction of flow in the boundary layer. Hence the boundary layer develops a point of inflection, known as the point of boundary layer separation, beyond which a circular flow pattern is established.
For aircraft wings, boundary layer separation can lead to very significant consequences ranging from an increase in pressure drag to a dramatic loss of lift, known as aerodynamic stall. The shape of an aircraft wing is essentially an elongated and perhaps asymmetric version of the cylinder shown above. Hence the airflow over the top convex surface of a wing follows the same basic principles outlined above:
- There is a point of stagnation at the leading edge.
- A region of accelerating mainstream flow (favourable pressure gradient) up to the point of maximum thickness.
- A region of decelerating mainstream flow (adverse pressure gradient) beyond the point of maximum thickness.
These three points are summarised in the schematic diagram below.
Boundary layer separation over the top surface of a wing.
Boundary layer separation is an important issue for aircraft wings as it induces a large wake that completely changes the flow downstream of the point of separation. Skin-friction drag arises due to inherent viscosity of the fluid, i.e. the fluid sticks to the surface of the wing and the associated frictional shear stress exerts a drag force. When a boundary layer separates, a drag force is induced as a result of differences in pressure upstream and downstream of the wing. The overall dimensions of the wake, and therefore the magnitude of pressure drag, depends on the point of separation along the wing. The velocity profiles of turbulent and laminar boundary layers (see image above) show that the velocity of the fluid increases much slower away from the wall for a laminar boundary layer. As a result, the flow in a laminar boundary layer will reverse direction much earlier in the presence of an adverse pressure gradient than the flow in a turbulent boundary layer.
To summarise, we now know that the inherent viscosity of a fluid leads to the presence of a boundary layer that has two possible sources of drag. Skin-friction drag due to the frictional shear stress between the fluid and the surface, and pressure drag due to flow separation and the existence of a downstream wake. As the total drag is the sum of these two effects, the aerodynamicist is faced with a non-trivial compromise:
- skin-friction drag is reduced by laminar flow due to a lower shear stress at the wall, but this increases pressure drag when boundary layer separation occurs.
- pressure drag is reduced by turbulent flow by delaying boundary layer separation, but this increases the skin-friction drag due to higher shear stresses at the wall.
As a result, neither laminar nor turbulent flow can be said to be preferable in general and judgement has to be made regarding the specific application. For a blunt body, such as a cylinder, pressure drag dominates and therefore a turbulent boundary layer is preferable. For more streamlined bodies, such as an aircraft wing at cruise, the overall drag is dominated by skin-friction drag and hence a laminar boundary layer is preferable. Dolphins, for example, have very streamlined bodies to maintain laminar flow. Early golfers, on the other hand, realised that worn rubber golf balls flew further than pristine ones, and this led to the innovation of dimples on golf balls. Fluid flow over golf balls is predominantly laminar due to the relatively low flight speeds. Dimples are therefore nothing more than small imperfections that transform the predominantly laminar flow into a turbulent one that delays the onset of boundary layer separation and therefore reduces pressure drag.

Aerodynamic Stall
The second, and more dramatic effect, of boundary layer separation in aircraft wings is aerodynamic stall. At relatively low angles of attack, for example during cruise, the adverse pressure gradient acting on the top surface of the wing is benign and the boundary layer remains attached over the entire surface. As the angle of attack is increased, however, so does the pressure gradient. At some point the boundary layer will start to separate near the trailing edge of the wing, and this separation point will move further upstream as the angle of attack is increased. If an aerofoil is positioned at a sufficiently large angle of attack, separation will occur very close to the point of maximum thickness of the aerofoil and a large wake will develop behind the point of separation. This wake redistributes the flow over the rest of the aerofoil and thereby significantly impairs the lift generated by the wing. As a result, the lift produced is seriously reduced in a condition known as aerodynamic stall. Due to the high pressure drag induced by the wake, the aircraft can further lose airspeed, pushing the separation point further upstream and creating a deleterious feedback loop where the aircraft literally starts to fall out of the sky in an uncontrolled spiral. To prevent total loss of control, the pilot needs to reattach the boundary as quickly as possible which is achieved by reducing the angle of attack and pointing the nose of the aircraft down to gain speed.
The lift produced by a wing is given by

where 



During cruise the angle of attack is relatively small (

High-lift Devices
A much more elegant solution are leading-edge slats and trailing-edge flaps. A slat is a thin, curved aerofoil that is fitted to the front of the wing and is intended to induce a secondary airflow through the gap between the slat and the leading edge. The air accelerates through this gap and thereby injects high momentum fluid into the boundary on the upper surface, delaying the onset of flow reversal in the boundary layer. Similarly, one or two curved aerofoils may be placed at the rear of wing in order to invigorate the flow near the trailing edge. In this case the high momentum fluid reinvigorates the flow which has been slowed down by the adverse pressure gradient. The maximum lift coefficient can typically be doubled by these devices and therefore allows big jumbo jets to land and takeoff at relatively low runway speeds.

Leading edge slats and trailing edge flaps on an aircraft wing
The next time you are sitting close to the wings observe how these devices are retracted after take-off and activated before landing. In fact, birds have a similar devices on their wings. The wings of bats are comprised of thin and flexible membranes reinforced by small bones which roughen the membrane surface and help to transition the flow from laminar to turbulent and prevent boundary layer separation. As is so often the case in engineering design, a lot of inspiration can be taken from nature!
In the early 20th century, a group of German scientists led by Ludwig Prandtl at the University of Göttingen began studying the fundamental nature of fluid flow and subsequently laid the foundations for modern aerodynamics. In 1904, just a year after the first flight by the Wright brothers, Prandtl published the first paper on a new concept, now known as the boundary layer. In the following years, Prandtl worked on supersonic flow and spent most of his time developing the foundations for wing theory, ultimately leading to the famous red triplane flown by Baron von Richthofen, the Red Baron, during WWI.
Prandtl’s key insight in the development of the boundary layer was that as a first-order approximation it is valid to separate any flow over a surface into two regions: a thin boundary layer near the surface where the effects of viscosity cannot be ignored, and a region outside the boundary layer where viscosity is negligible. The nature of the boundary layer that forms close to the surface of a body significantly influences how the fluid and body interact. Hence, an understanding of boundary layers is essential in predicting how much drag an aircraft experiences, and is therefore a mandatory requirement in any first course on aerodynamics.
Boundary layers develop due to the inherent stickiness or viscosity of the fluid. As a fluid flows over a surface, the fluid sticks to the solid boundary which is the so-called “no-slip condition”. As sudden jumps in flow velocity are not possible for flow continuity requirements, there must exist a small region within the fluid, close to the body over which the fluid is flowing, where the flow velocity increases from zero to the mainstream velocity. This region is the so-called boundary layer.
The U-shaped profile of the boundary layer can be visualised by suspending a straight line of dye in water and allowing fluid flow to distort the line of dye (see below). The distance of a distorted dye particle to its original position is proportional to the flow velocity. The fluid is stationary at the wall, increases in velocity moving away from the wall, and then converges to the constant mainstream value 


To further investigate the nature of the flow within the boundary layer, let’s split the boundary layer into small regions parallel to the surface and assume a constant fluid velocity within each of these regions (essentially the arrows in the figure above). We have established that the boundary layer is driven by viscosity. Therefore, adjacent regions within the boundary layer that move at slightly different velocities must exert a frictional force on each other. This is analogous to you running your hand over a table-top surface and feeling a frictional force on the palm of your hand. The shear stresses 


where 
Prandtl first noted that shearing forces are negligible in mainstream flow due to the low viscosity of most fluids and the near uniformity of flow velocities in the mainstream. In the boundary layer, however, appreciable shear stresses driven by steep velocity gradients will arise.
So the pertinent question is: Do these two regions influence each other or can they be analysed separately?
Prandtl argued that for flow around streamlined bodies, the thickness of the boundary layer is an order of magnitude smaller than the thickness of the mainstream, and therefore the pressure and velocity fields around a streamlined body may analysed disregarding the presence of the boundary layer.
Eliminating the effect of viscosity in the free flow is an enormously helpful simplification in analysing the flow. Prandtl’s assumption allows us to model the mainstream flow using Bernoulli’s equation or the equations of compressible flow that we have discussed before, and this was a major impetus in the rapid development of aerodynamics in the 20th century. Today, the engineer has a suite of advanced computational tools at hand to model the viscid nature of the entire flow. However, the idea of partitioning the flow into an inviscid mainstream and viscid boundary layer is still essential for fundamental insights into basic aerodynamics.
Laminar and turbulent boundary layers
One simple example that nicely demonstrates the physics of boundary layers is the problem of flow over a flat plate.
Development of boundary layer over a flat plate including the transition from a laminar to turbulent boundary layer.
The fluid is streaming in from the left with a free stream velocity 
Close to the leading edge the flow is entirely laminar, meaning the fluid can be imagined to travel in strata, or lamina, that do not mix. In essence, layers of fluid slide over each other without any interchange of fluid particles between adjacent layers. The flow speed within each imaginary lamina is constant and increases with the distance from the surface. The shear stress within the fluid is therefore entirely a function of the viscosity and the velocity gradients.
Further downstream, the laminar flow becomes unstable and fluid particles start to move perpendicular to the surface as well as parallel to it. Therefore, the previously stratified flow starts to mix up and fluid particles are exchanged between adjacent layers. Due to this seemingly random motion this type of flow is known as turbulent. In a turbulent boundary layer, the thickness
An excellent example contrasting the differences in turbulent and laminar flow is the smoke rising from a cigarette.
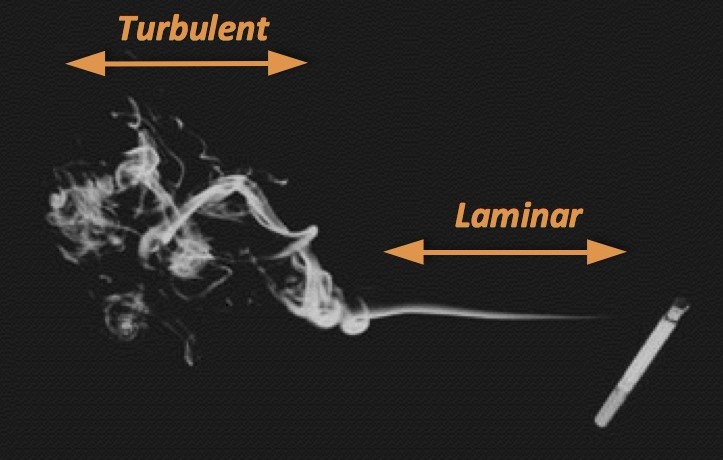
Laminar and turbulent flow in smoke
As smoke rises it transforms from a region of smooth laminar flow to a region of unsteady turbulent flow. The nature of the flow, laminar or turbulent, is captured very efficiently in a single parameter known as the Reynolds number

where 
There exists a critical Reynolds number in the region 
Velocity profiles
Due to the different degrees of fluid mixing in laminar and turbulent flows, the shape of the two boundary layers is different. The increase in fluid velocity moving away from the surface (y-direction) must be continuous in order to guarantee a unique value of the velocity gradient
In the case of laminar flow, the shape of the boundary layer is indeed quite smooth and does not change much over time. For a turbulent boundary layer however, only the average shape of the boundary layer approximates the parabolic profile discussed above. The figure below compares a typical laminar layer with an averaged turbulent layer.
Velocity profile of laminar versus turbulent boundary layer
In the laminar layer, the kinetic energy of the free flowing fluid is transmitted to the slower moving fluid near the surface purely means by of viscosity, i.e. frictional shear stresses. Hence, an imaginary fluid layer close to the free stream pulls along an adjacent layer close to the wall, and so on. As a result, significant portions of fluid in the laminar boundary layer travel at a reduced velocity. In a turbulent boundary layer, the kinetic energy of the free stream is also transmitted via Reynolds stresses, i.e. momentum exchanges due to the intermingling of fluid particles. This leads to a more rapid rise of the velocity away from the wall and a more uniform fluid velocity throughout the entire boundary layer. Due to the presence of the viscous sublayer in the close vicinity of the wall, the wall shear stress in a turbulent boundary layer is governed by the usual equation
Skin Friction drag
Fluids can only exert two types of forces: normal forces due to pressure and tangential forces due to shear stress. Pressure drag is the phenomenon that occurs when a body is oriented perpendicular to the direction of fluid flow. Skin friction drag is the frictional shear force exerted on a body aligned parallel to the flow, and therefore a direct result of the viscous boundary layer.
Due to the greater shear stress at the wall, the skin friction drag is greater for turbulent boundary layers than for laminar ones. Skin friction drag is predominant in streamlined aerodynamic profiles, e.g. fish, airplane wings, or any other shape where most of the surface area is aligned with the flow direction. For these profiles, maintaining a laminar boundary layer is preferable. For example, the crescent lunar shaped tail of many sea mammals or fish has evolved to maintain a relatively constant laminar boundary layer when oscillating the tail from side to side.
One of Prandtl’s PhD students, Paul Blasius, developed an analytical expression for the shape of a laminar boundary layer over a flat plate without a pressure gradient. Blasius’ expression has been verified by experiments many times over and is considered a standard in fluid dynamics. The two important quantities that are of interest to the designer are the boundary layer thickness 

with 


Next, we can use a similar expression to determine the shear stress at the wall. To do this we first define another non dimensional number known as the drag coefficient

which is the value of the shear stress at the wall normalised by the dynamic pressure of the free-flow. According to Blasius, the skin-friction drag coefficient is simply governed by the Reynolds number

This simple example reiterates the power of dimensionless numbers we mentioned before when discussing wind tunnel testing. Even though the shear stress at the wall is a dimensional quantity, we have been able to express it merely as a function of two non-dimensional quantities 


and therefore scales proportional to 


where 
Hence, 
Unfortunately, do to the chaotic nature of turbulent flow, the boundary layer thickness and skin drag coefficient for a turbulent boundary layer cannot be determined as easily in a theoretical manner. Therefore we have to rely on experimental results to define empirical approximations of these quantities. The scientific consensus of the these relations are as follows:


Therefore the thickness of a turbulent boundary layer grows proportional to 


Skin friction drag and wing design
The unfortunate fact for aircraft designers is that turbulent flow is much more common in nature than laminar flow. The tendency for flow to be random rather than layered can be interpreted in a similar way to the second law of thermodynamics. The fact that entropy in a closed system only increases is to say that, if left to its own devices, the state in the system will tend from order to disorder. And so it is with fluid flow.
However, the shape of a wing can be designed in such a manner as to encourage the formation of laminar flow. The P-51 Mustang WWII fighter was the first production aircraft designed to operate with laminar flow over its wings. The problem back then, and to this day, is that laminar flow is incredibly unstable. Protruding rivet heads or splattered insects on the wing surface can easily “trip” a laminar boundary layer into turbulence, and preempt any clever design the engineer concocted. As a result, most of the laminar flow wings that have been designed based on idealised conditions and smooth wing surfaces in a wind tunnel have not led to the sweeping improvements originally imagined.

For many years NASA conducted a series of experiments to design a natural laminar flow (NLF) aircraft. Some of their research suggested the wrapping of a glove around the leading edge of a Boeing 757 just outboard of the engine. The modified shape of this wing promotes laminar flow at the high altitudes and almost sonic flight conditions of a typical jet airliner. To prevent the build up of insect splatter at take-off a sheath of paper was wrapped around the glove which was then torn away at altitude. Even though the range of such an aircraft could be increased by almost 15% this, rather elaborate scheme, never made it into production.
In the mid 1990s NASA fitted active test panels to the wings of two F-16’s in order to test the possibility of achieving laminar flow on swept delta-wings flying at supersonic speed; in NASA’s view a likely wing configuration for future supersonic cruise aircraft. The active test panels essentially consisted of titanium covers perforated with millions of microscopic holes, which were attached to the leading edge and the top surface of the wing. The role of these panels was to suck most of the boundary layer off the top surface through perforations using an internal pumping system. By removing air from the boundary layer its thickness decreased and thereby promoted the stability of the laminar boundary layer over the wing. This Supersonic Laminar Flow (SLFC) project successfully maintained laminar flow over a large portion of the wing during supersonic flight of up to Mach 1.6.
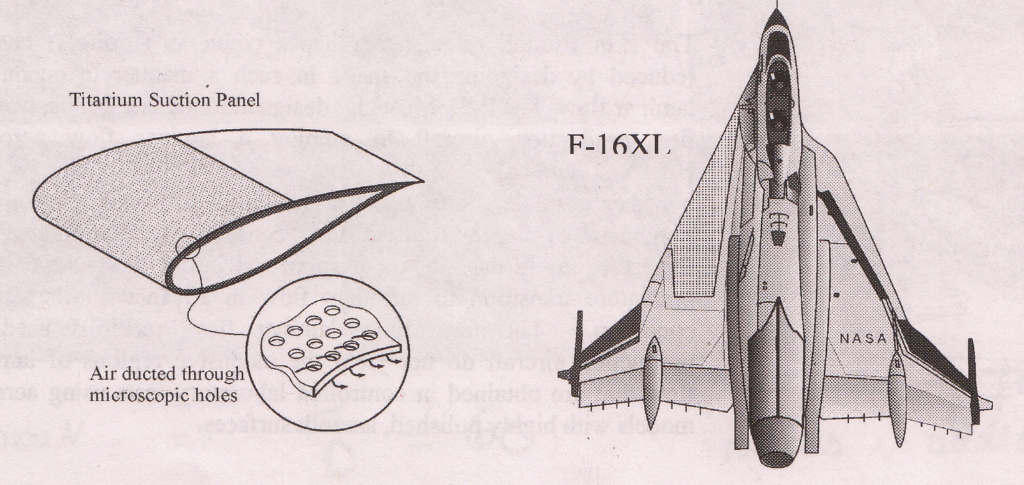
F-16 XL with suction panels to promote laminar flow
While these elaborate schemes have not quite found their way into mass production (probably due to their cost, maintenance problems and risk), laminar flow wings are a very viable future technology in terms of reducing greenhouse gases as stipulated by environmental legislation. An important driver in reducing greenhouse gases is maximising the lift-to-drag ratio of the wings, and therefore I would expect research to continue in this field for some time to come.
Despite the growing computer power and increasing sophistication of computational models, any design meant operate in the real world requires some form of experimental validation. The idealist modeller, me included, wants to believe that computer simulation will replace all forms of experimental testing and thereby allow for much faster design cycles. The issue with this is that random imperfections, and most importantly their concurrence, are very hard to account for robustly, especially when operating in nonlinear domains. As a result, the quantity and quality of both computational and experimental validation have increased in lockstep over the few last decades.
In “The Wind and Beyond”, the autobiography of Theodore von Kármán, one of the pre-eminent aerospace engineers and scientists of the 20th century, von Kármán recounts a telling episode regarding the role of wind tunnel testing in the development of the Douglas DC-3, the first American commercial jetliner. Early versions of the DC-3 faced a problem with aerodynamic instabilities that could throw the airplane out of control. A similar problem had been noticed earlier on the Northrop Alpha airplane, which, like the DC-3, featured a wing that was attached to the underside of the fuselage. When two of von Kármán’s assistants, Major Klein and Clark Millikan, subjected a model of the Alpha to high winds in a wind tunnel, the model aircraft started to sway and shake violently. In the following investigation, Klein and Millikan found that the sharp corner at the connection between the wing and fuselage decelerated the air as it flowed past, causing boundary layer separation and a wake of eddies. As these eddies broke away from the trailing edge of the wing, they adversely impacted the flow over the horizontal stabiliser and vertical tail fin at the rear of the aircraft and resulted in uncontrollable vibrations.
.jpg)
The Northrop Alpha plane with the Kármán fillet at the wing-fuselage joint
When testing the aerodynamics of aircraft, the wind tunnel is indispensable. The Wright brothers built their own wind tunnel to validate the research data on airfoils that had been recorded throughout the 19th century. One of the most important pieces of equipment in the early days of NACA (now NASA) was a variable-density wind tunnel, which by pressurising the air, allowed realistic operating conditions to be simulated on 1/20th geometrically-scaled models.

NACA variable density wind tunnel
Do you need to build individual wind-tunnels big enough to fit a particular aircraft? Or can you use a smaller multi-purpose wind tunnel to test small-scale models of the actual aircraft? If this is the case, how representative is the collected data of the actual flying aircraft?
Luckily we can make use of some clever mathematics, known as dimensional analysis, to make our life a little easier. The key idea behind dimensional analysis is to define a set of dimensionless parameters that govern the physical behaviour of the phenomenon being studied, purely by identifying the fundamental dimensions (time, length and mass in aerodynamics) that are at play. This is best illustrated by an example.
The United States developed the atomic bomb during WWII under the greatest security precautions. Even many years after the first test of 1945 in the desert of New Mexico, the total amount of energy released during the explosion remained unknown. The British scientist G.I. Taylor then famously estimated the total amount of energy released by the explosion simply by using available pictures showing the explosion plume at different time stamps after detonation.
Nuclear explosion time frames
By assuming that the shock wave could be modelled as a perfect sphere, Taylor posited that the size of the plume, i.e. the radius 


In dimensional analysis we proceed to define the fundamental units or dimensions that quantify our variables. So in this case:
- Radius is defined by a distance, and therefore the units are length, i.e.
- The units of time are, you guessed it, time, i.e.
- Energy is force times distance, where a force is mass times acceleration, and acceleration is distance divided by time squared i.e.
- Density is mass divided by volume, where volume is a distance cubed, i.e.
![[R] = L.](https://s0.wp.com/latex.php?latex=%5BR%5D+%3D+L.&bg=ffffff&fg=000&s=0&c=20201002)
![[t] = T.](https://s0.wp.com/latex.php?latex=%5Bt%5D+%3D+T.&bg=ffffff&fg=000&s=0&c=20201002)
![[E] = \left(\frac{ML}{T^2}\right)L = \frac{M L^2}{T^2}.](https://s0.wp.com/latex.php?latex=%5BE%5D+%3D+%5Cleft%28%5Cfrac%7BML%7D%7BT%5E2%7D%5Cright%29L+%3D+%5Cfrac%7BM+L%5E2%7D%7BT%5E2%7D.&bg=ffffff&fg=000&s=0&c=20201002)
![[\rho] = \frac{M}{L^3}.](https://s0.wp.com/latex.php?latex=%5B%5Crho%5D+%3D+%5Cfrac%7BM%7D%7BL%5E3%7D.&bg=ffffff&fg=000&s=0&c=20201002)
Having determined all our variables in the fundamental dimensions of distance, time and mass, we now attempt to relate the radius of the explosion to the energy, density and time. If we assume that the radius is proportional to these three variables, then dividing the radius by the product of the other three variables must result in a dimensionless number. Hence,

Or alternatively, all fundamental dimensions in the above fraction must cancel:

For all units to disappear we need:

and solving this system gives:

Therefore the shock wave radius is given by

and by re-arranging

where 
So, we have an expression that relates the energy of the explosion to the radius, the density of air and time after detonation, which were all available to Taylor from the individual time stamps (these provided a diameter estimate and the time after detonation. The density of the air was known).
In the example above, specific calculations of 
The most famous dimensionless number in aerodynamics is probably the Reynolds number which quantifies the nature of the flow, i.e. is it laminar (nice and orderly in layers that do not mix), or is it turbulent, or somewhere in between?
In determining aerodynamic forces, two of the important variables we want to understand and quantify are the lift and drag. Particularly, we want to determine how the lift and drag vary with independent parameters such as the flight velocity, wing area and the properties of the surrounding area.
Using a similar method as above, it can be shown that the two primary dimensionless variables are the lift (
Lift coefficient:

Drag coefficient:

where 
As long as the geometry of our vehicle remains the same (scaling up and down at constant ratio of relative dimensions, e.g. length, width, height, wing span, chord etc.), these two parameters are only dependent on two other dimensionless variables: the Reynolds number

where 

which is the ratio of aircraft speed to the local speed of sound.
Let’s recap what we have developed until now. We have two dimensionless parameters, the lift and drag coefficients, which measure the amount of lift and drag an airfoil or flight vehicle creates normalised by the conditions of the surrounding fluid (
As an example consider a prototype aircraft flying at altitude and a scaled version of the same aircraft in a wind tunnel. The model and prototype aircraft have the same geometrical shape and only vary in terms of their absolute dimensions and the operating conditions. If the values of Reynolds number and Mach number of the flow are the same for both, then the flows are called dynamically similar, and as the geometry of the two aircraft are scaled version of each other, it follows that the lift and drag coefficients must be the same too. This concept of dynamic similarity is crucial for wind-tunnel experiments as it allows engineers to create small-scale models of full-sized aircraft and reliably predict their aerodynamic qualities in a wind tunnel.
This of course means that the wind tunnel needs to be operated at entirely different temperatures and pressures than the operating conditions at altitude. As long as the dimensions of the model remain in proportion upon scaling up or down, the model wing area scales with the square of the wing chord, i.e. 
Using the definition of

and the drag by

The lift and drag created by an aircraft or model under constant Mach number and Reynolds number scale with the wing area or the wing chord squared. Rearranging the equation for the Reynolds number, the wing chord can in fact be shown to be proportional to the operating temperature and pressure of the fluid flow. So by rearranging the Reynolds number equation:

and from the fundamental gas equation

and the Mach Number we have

such that we can reformulate the chord length as follows

Hence, the chord of the model is inversely proportional to the fluid pressure and directly proportional to the square of the fluid temperature. Thus, maximising the pressure and reducing the temperature (maximum fluid density) reduces the required size of the model and the overall aerodynamic forces. The was the concept behind NACA’s early variable density tunnel and is still exploited in modern cryogenic wind tunnels.
(Caveat: There is a little bit more maths in this post than usual. I have tried to explain the equations as good as possible using diagrams. In any case, the real treat is at the end of the post where I go through the design of rocket nozzles. However, understanding this design methodology is naturally easier by first reading what comes before.)
One of the most basic equations in fluid dynamics is Bernoulli’s equation: the relationship between pressure and velocity in a moving fluid. It is so fundamental to aerodynamics that it is often cited (incorrectly!) when explaining how aircraft wings create lift. The fact is that Bernoulli’s equation is not a fundamental equation of aerodynamics at all, but a particular case of the conservation of energy applied to a fluid of constant density.
The underlying assumption of constant density is only valid for low-speed flows, but does not hold in the case of high-speed flows where the kinetic energy causes changes in the gas’ density. As the speed of a fluid approaches the speed of sound, the properties of the fluid undergo changes that cannot be modelled accurately using Bernoulli’s equation. This type of flow is known as compressible. As a rule of thumb, the demarcation line for compressibility is around 30% the speed of sound, or around 100 m/s for dry air close to Earth’s surface. This means that air flowing over a normal passenger car can be treated as incompressible, whereas the flow over a modern jumbo jet is not.
The fluid dynamics and thermodynamics of compressible flow are described by five fundamental equations, of which Bernoulli’s equation is a special case under the conditions of constant density. For example, let’s consider an arbitrary control volume of fluid and assume that any flow of this fluid is
- adiabatic, meaning there is no heat transfer out of or into the control volume.
- inviscid, meaning no friction is present.
- at constant energy, meaning no external work (for example by a compressor) is done on the fluid.
This type of flow is known as isentropic (constant entropy), and includes fluid flow over aircraft wings, but not fluid flowing through rotating turbines.
At this point you might be wondering how we can possible increase the speed of a gas without passing it through some machine that adds energy to the flow?
The answer is the fundamental law of conservation of energy. The temperature, pressure and density of a fluid at rest are known as the stagnation temperature, stagnation pressure and stagnation density, respectively. These stagnation values are the highest values that the gas can possibly attain. As the flow velocity of a gas increases, the pressure, temperature and density must fall in order to conserve energy, i.e. some of the internal energy of the gas is converted into kinetic energy. Hence, expansion of a gas leads to an increase in its velocity.
The isentropic flow described above is governed by five fundamental conservation equations that are expressed in terms density (




– Conservation of mass:
– Conservation of linear momentum:
– Conservation of energy:
– Equation of state:
– Conservation of entropy (in adiabatic and inviscid flow only):





where 
The Speed of Sound
Fundamental to the analysis of supersonic flow is the concept of the speed of sound. Without knowledge of the local speed of sound we cannot gauge where we are on the compressibility spectrum.
As a simple mind experiment, consider the plunger in a plastic syringe. The speed of sound describes the speed at which a pressure wave is transmitted through the air chamber by a small movement of the piston. As a very weak wave is being transmitted, the assumptions made above regarding no heat transfer and inviscid flow are valid here, and any variations in the temperature and pressure are small. Under these conditions it can be shown from only the five conservation equations above that the local speed of sound within the fluid is given by:

The term 



Why is the speed of sound purely a function of temperature?
Well, the temperature of a gas is a measure of the gas’ kinetic energy, which essentially describes how much the individual gas molecules are jiggling about. As the air molecules are moving randomly with differing instantaneous speeds and energies at different points in time, the temperature describes the average kinetic energy of the collection of molecules over a period of time. The higher the temperature the more ferocious the molecules are jiggling about and the more often they bump into each other. A pressure wave momentarily disturbs some particles and this extra energy is transferred through the gas by the collisions of molecules with their neighbours. The higher the temperature, the quicker the pressure wave is propagated through the gas due to the higher rate of collisions.
This visualisation is also helpful in explaining why the speed of sound is a special property in fluid dynamics. One possible source of an externally induced pressure wave is the disturbance of an object moving through the fluid. As the object slices through the air it collides with stationary air particles upstream of the direction of motion. This collision induces a pressure wave which is transmitted via the molecular collisions described above. Now imagine what happens when the object is travelling faster than the speed of sound. This means the moving object is creating new disturbances upstream of its direction of motion at a faster rate than the air can propagate the pressure waves through the gas by means of molecular collisions. The rate of pressure wave creation is faster than the rate of pressure wave transmission. Or put more simply, information is created more quickly than it can be transmitted; we have run out of bandwidth. For this reason, the speed of sound marks an important demarcation line in fluid dynamics which, if exceeded, introduces a number of counter-intuitive effects.
Given the importance of the speed of sound, the relative speed of a body with respect to the local speed of sound is described by the Mach Number:
The Mach number is named after Ernst Mach who conducted many of the first experiments on supersonic flow and captured the first ever photograph of a shock wave (shown below).

As described previously, when an object moves through a gas, the molecules just ahead of the object are pushed out of the way, creating a pressure pulse that propagates in all directions (imagine a spherical pressure wave) at the speed of sound relative to the fluid. Now let’s imagine a loudspeaker emitting three sound pulses at equal intervals, 


If the object is stationary, then the three sound pulses at times 


However, if the object starts moving in one direction, the centre of the spheres shift to the side and the sound pulses bunch up in the direction of motion and spread out in the opposite direction. A bystander listening to the sound pulses upstream of the loudspeaker would therefore hear a higher pitched sound than a downstream bystander as the frequency the sound waves reaching him are higher. This is known as the Doppler effect.
If the object now accelerates to the local speed of sound, then the centres of the sound pulse spheres will be travelling just as fast as the sound waves themselves and the spherical waves all touch at one point. This means no sound can travel ahead of the loudspeaker and consequently an observer ahead of the loudspeaker will hear nothing.
Finally, if the loudspeaker travels at a uniform speed greater than the speed of sound, then the loudspeaker will in fact overtake the sound pulses it is creating. In this case, the loudspeaker and the leading edges of the sound waves form a locus known as the Mach cone. An observer standing outside this cone is in a zone of silence and is not aware of the sound waves created by the loudspeaker.
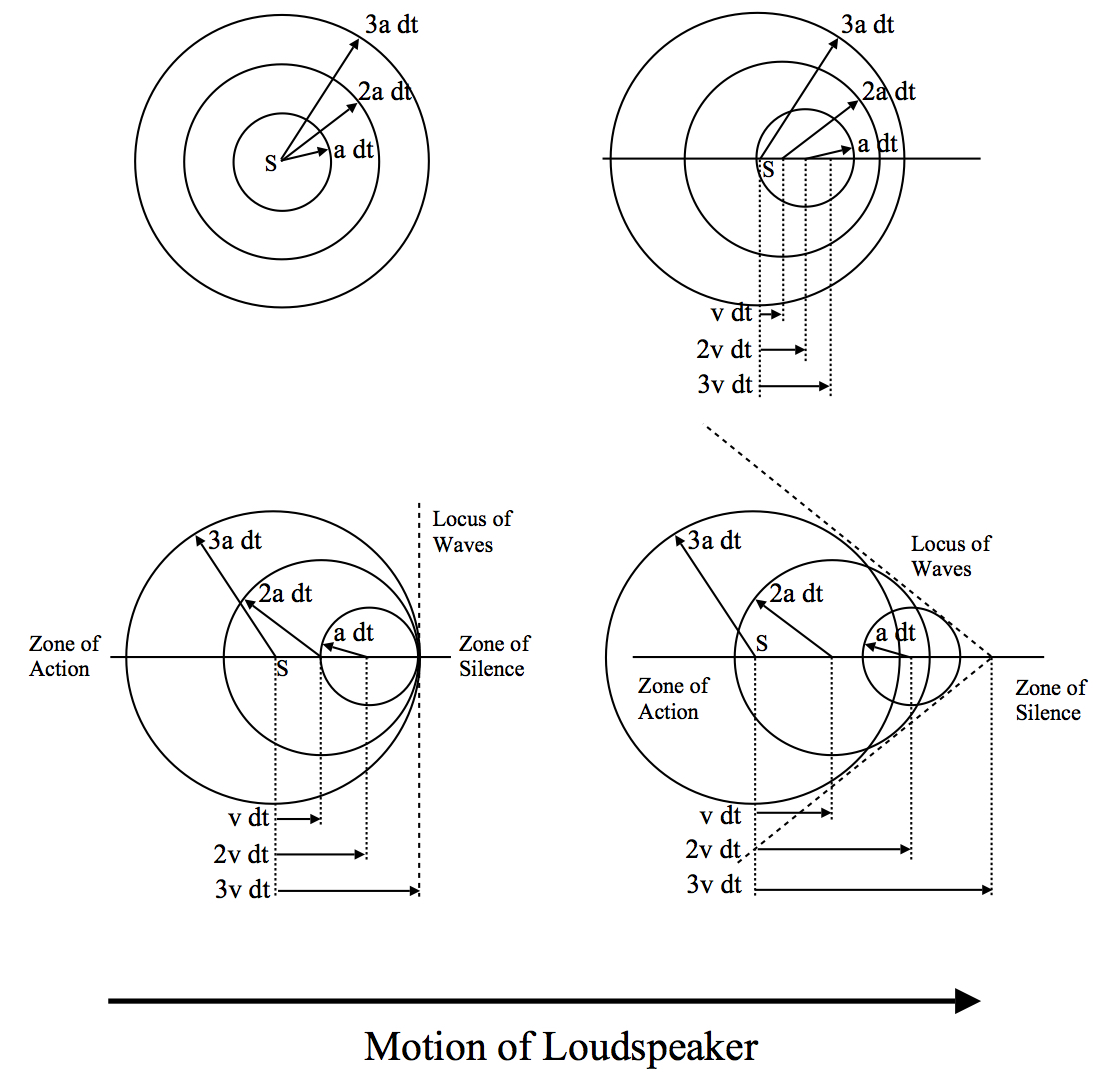
S is the starting point of the load speaker which then moves to the right of the screen emitting three sound pulses at times dt, 2dt and 3dt.
The half angle of this cone is known as the Mach angle and is equal to

and therefore 
As mentioned previously, the temperature, pressure and density of the gas all fall as the flow speed of the gas increases. The relation between Mach number and temperature can be derived directly from the conservation of energy (stated above) and is given by:

where 

An intuitive way of explaining the relationship between temperature and flow speed is to return to the description of the vibrating gas molecules. Previously we established that the temperature of a gas is a measure of the kinetic energy of the vibrating molecules. Hence, the stagnation temperature is the kinetic energy of the random motion of the air molecules in a stationary gas. However, if the gas is moving in a certain direction at speed then there will be a real net movement of the air molecules. The molecules will still be vibrating about, but at a net movement in a specific direction. If the total energy of the gas is to remain constant (no external work), some of the kinetic energy of the random vibrations must be converted into kinetic energy of directed motion, and hence the energy associated with random vibration, i.e. the temperature, must fall. Therefore, the gas temperature falls as some of the thermal internal energy is converted into kinetic energy.
In a similar fashion, for flow at constant entropy, both the pressure and density of the fluid can be quantified by the Mach number.


In this regard the Mach number can simply be interpreted as the degree of compressibility of a gas. For small Mach numbers (M< 0.3), the density changes by less than 5% and this is why the assumptions of constant density underlying Bernoulli’s equation are applicable.
An Application: Convergent-divergent Nozzles
In typical engineering applications, compressible flow typically occurs in ducts, e.g. engine intakes, or through the exhaust nozzles of afterburners and rockets. This latter type of flow typically features changes in area. If we consider a differential, i.e. infinitesimally small control volume, where the cross-sectional area changes by 


Without solving this equation for a specific problem we can reveal some interesting properties of compressible flow:
- For M < 1, i.e. subsonic flow,
with
- For M = 1, i.e. sonic flow
. As
and therefore the area must be a minimum for sonic flow.
- For M > 1, i.e. supersonic flow
. This means that increasing the flow velocity is only possible with an increase in cross-sectional area and vice versa.
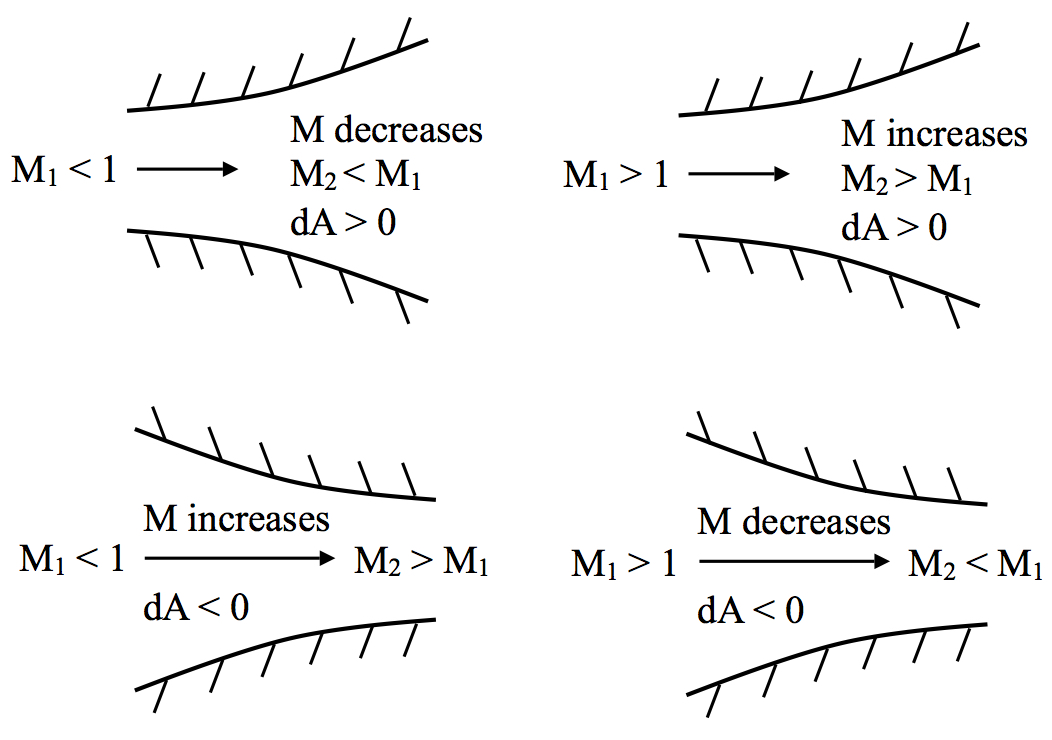
Subsonic and supersonic flow in nozzles
Hence, because of the term 

The flow through such a bell-shaped convergent-divergent nozzle is driven by the pressure difference between the combustion chamber and the nozzle outlet. In the combustion chamber the gas is basically at rest and therefore at stagnation pressure. As it exits the nozzle, the gas is typically moving and therefore at a lower pressure. In order to create supersonic flow, the first important condition is a high enough pressure ratio between the combustion chamber and the throat of the nozzle to guarantee that the flow is sonic at the throat. Without this critical condition at the throat, there can be no supersonic flow in the divergent section of the nozzle.
We can determine this exact pressure ratio for dry air (

Therefore, a pressure ratio greater than or equal to 1.893 is required to guarantee sonic flow at the throat. The temperature at this condition would then be:

or 1.2 times smaller than the temperature in the combustion chamber (as long as there is no heat loss or work done in the meantime, i.e. isentropic flow).
Shock Waves
The term “shock wave” implies a certain sense of drama; the state of shock after a traumatic event, the shock waves of a revolution, the shock waves of an earthquake, thunder, the cracking of a whip, and so on. In aerodynamics, a shock wave describes a thin front of energy, approximately 
The Prandtl relation provides a means of calculating the speed of the fluid flow after a normal shock, given the flow speed before the shock.

where 

We can further extend the Prandtl relation to express all flow properties (speed, temperature, pressure and density) in terms of the upstream Mach number 

and because we know the relationship between temperature, stagnation temperature and Mach number from above:

substitution for states 1 and 2 the Prandtl relation is transformed into:

This equation looks a bit clumsy but it is actually quite straightforward given that the terms involving
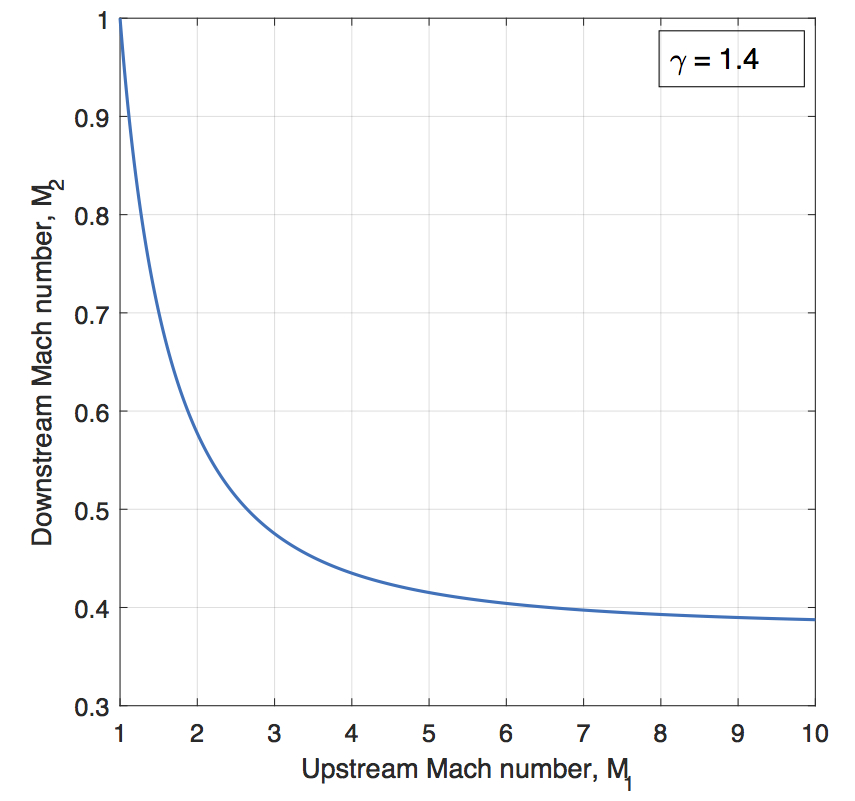
Change in Mach number across a shock wave
It is clear from the figure that for 


Both the temperature and pressure ratios increase with higher Mach number such that both 






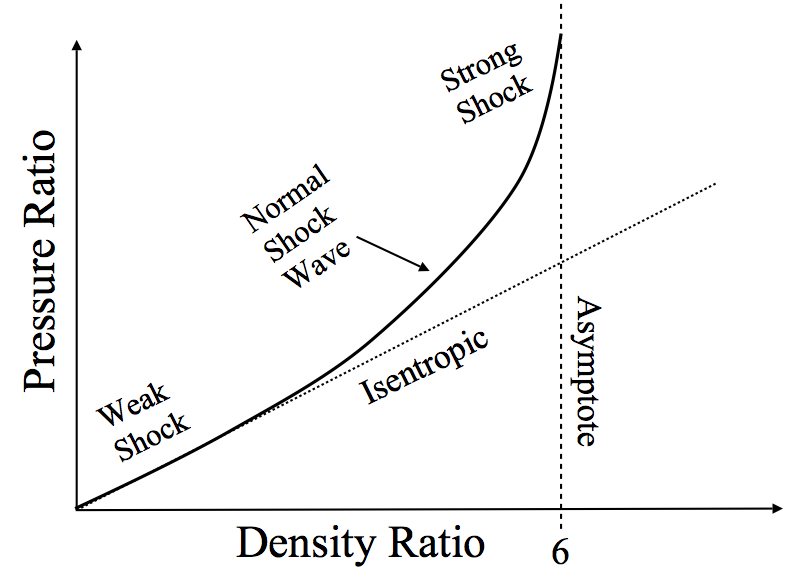
Pressure and density ratios across a shock wave
Even though the Rankine equations are valid mathematically for subsonic flow, the predicted fluid properties lead to a decrease in entropy, which contradicts the Second Law of Thermodynamics. Hence, shock waves can only be created in supersonic flow and the pressure, temperature and density always increase across it.
Designing Convergent-divergent Nozzles
With our new-found knowledge on supersonic flow and nozzles we can now begin to intuitively design a convergent-divergent nozzle to be used on a rocket. Consider two reservoirs connected by a convergent-divergent nozzle (see figure below).

Convergent-divergent nozzle schematic and variations of pressure along the length of the nozzle
The gas within the upstream reservoir is stagnant at a specific stagnation temperature 



- The no-flow condition: In this case the valve is closed and
. This is the trivial condition where nothing interesting happens. No flow, nothing, boring.
- Subsonic flow regime: The valve is opened slightly and the flow is entirely subsonic throughout the entire nozzle. The pressure decreases from the stagnant condition in the upstream reservoir to a minimum at the throat, but because the flow does not reach the critical pressure ratio
, the flow does not reach Mach 1 at the throat. Hence, the flow cannot accelerate further in the divergent section and slows down again, thereby increasing the pressure. The exit pressure
- Choking condition: The back pressure has now reached a critical condition and is low enough for the flow to reach Mach 1 at the throat. Hence,
) and therefore the divergent section of the nozzle still acts as a diffuser; the flow does not go supersonic. However, as the flow can not go faster than Mach 1 at the throat, the maximum mass flow rate has been achieved and the nozzle is now choked.
- Non-isentropic flow regime: Lowering the back pressure further means that the flow now reaches Mach 1 at the throat and can then accelerate to supersonic speeds within the divergent portion of the nozzle. The flow in the convergent section of the nozzle remains the same as in condition 3) as the nozzle is choked. Due to the supersonic flow, a shock wave forms within the divergent section turning the flow from supersonic into subsonic. Downstream of the shock the divergent nozzle now diffuses the flow further to equalise the back pressure and exit pressure (
- Exit plane shock condition: This is the limiting condition where the shock wave in the divergent portion has moved exactly to the exit plane. At the exit of the nozzle there is an abrupt increase in pressure at the exit plane and therefore the exit plane pressure and back pressure are still the same (
- Overexpansion flow regime: The back pressure is now low enough that the flow is subsonic throughout the convergent portion of the nozzle, sonic at the throat and supersonic throughout the entire divergent portion. This means that the exit pressure is now lower than the gas pressure (the flow is overexpanded), causing it to suddenly contract once it exits the nozzle. These sudden compressions cause nonisentropic oblique pressure waves which cannot be modelled using the simple 1D flow assumptions we have made here.
- Nozzle design condition: At the nozzle design condition the back pressure is low enough to match the pressure of the supersonic flow at the exit plane. Hence, the flow is entirely isentropic within the nozzle and inside the downstream reservoir. As described in a previous post on rocketry, this is the ideal operating condition for a nozzle in terms of efficiency.
- Underexpansion flow regime: Contrary to the over expansion regime, the back pressure is now lower than the exit pressure of the supersonic flow, such that the exit flow must expand to equilibrate with the reservoir pressure. In this case, the flow is again governed by oblique pressure waves, which this time expand outward rather than contract inward.
Thus, as we have seen the flow inside and outside of the nozzle is driven by the back pressure and by the requirement of the exit pressure and back pressure to equilibrate once the flow exits the nozzle. In some cases this occurs as a result of shocks inside the nozzle and in others as a result of pressure waves outside. In terms of the structural mechanics of the nozzle, we obviously do not want shock to occur inside the nozzle in case this damages the structural integrity. Ideally, we would want to operate a rocket nozzle at the design condition, but as the atmospheric pressure changes throughout a flight into space, a rocket nozzle is typically overexpanded at take-off and underexpanded in space. To account for this, variable area nozzles and other clever ideas have been proposed to operate as close as possible to the design condition.
This is the fourth and final part of a series of posts on rocket science. Part I covered the history of rocketry, Part II dealt with the operating principles of rockets and Part III looked at the components that go into the propulsive system.
One of the most important drivers in rocket design is the mass ratio, i.e. the ratio of fuel mass to dry mass of the rocket. The greater the mass ratio the greater the change in velocity (delta-v) the rocket can achieve. You can think of delta-v as the pseudo-currency of rocket science. Manoeuvres into orbit, to the moon or any other point in space are measured by their respective delta-v’s and this in turn defines the required mass ratio of the rocket.
For example, at an altitude of 200 km an object needs to travel at 7.8 km/s to inject into low earth orbit (LEO). Accounting for frictional losses and gravity, the actual requirement rocket scientists need to design for when starting from rest on a launch pad is just shy of delta-v=10 km/s. Using Tsiolovsky’s rocket equation and assuming a representative average exhaust velocity of 3500 m/s, this translates into a mass ratio of 17.4:


A mass ratio of 17.4 means that the rocket needs to be 
This simple example explains why the mass ratio is a key indicator of a rocket’s structural efficiency. The higher the mass ratio the greater the ratio of delta-v producing propellant to non-delta-v producing structural mass. The simple example also explains why staging is such an effective strategy. Once, a certain amount of fuel within the tanks has been used up, it is beneficial to shed the unnecessary structural mass that was previously used to contain the fuel but is no longer contributing to delta-v.
At the same time we need to ask ourselves how to best minimise the mass of the rocket structure?
So in this post we will turn to my favourite topic of all: Structural design. Let’s dig in…
The role of the rocket structure is to provide some form of load-bearing frame while simultaneously serving as an aerodynamic profile and container for propellant and payload. In order to maximise the mass ratio, the rocket designer wants to minimise the structural mass that is required to safely contain the propellant. There are essentially two ways to achieve this:
- Using lightweight materials.
- And/or optimising the geometric design of the structure.
When referring to “lightweight materials” what we mean is that the material has high values of specific stiffness, specific strength and/or specific toughness. In this case “specific” means that the classical engineering properties of elastic modulus (stiffness), yield or ultimate strength, and fracture toughness are weighted by the density of the material. For example, if a design of given dimensions (fixed volume) requires a certain stiffness and strength, and we can achieve these specifications with a material of superior specific properties, then the mass of the structure will be reduced compared to some other material. In the rocket industry the typical materials are aerospace-grade titanium and aluminium alloys as their specific properties are much more favourable than those of other metal alloys such as steel.
However, over the last 30 years there has been a drive towards increasing the proportion of advanced fibre-reinforced plastics in rocket structures. One of the issues with composites is that the polymer matrices that bind the fibres together become rather brittle (think of shattering glass) under the cryogenic temperatures of outer space or when in contact with liquid propellants. The second issue with traditional composites is that they are more flammable; obviously not a good thing when sitting right next to liquid hydrogen and oxygen. Third, it is harder to seal composite rocket tanks and especially bolted joints are prone to leaking. Finally, the high-performance characteristics that are needed for space applications require the use of massive high-pressure, high-temperature ovens (autoclaves) and tight-tolerance moulds which significantly drive up manufacturing costs. For these reasons the use composites is mostly restricted to payload fairings. NASA is currently working hard on their out-of-autoclave technology and automated fibre placement technology, while RocketLabs have announced that they will be designing a carbon-composite rocket too, and I would expect this technology to mature over the next decade.
The load-bearing structure in a rocket is very similar to the fuselage of an airplane and is based on the same design philosophy: semi-monocoque construction. In contrast to early aircraft that used frames of discrete members braced by wires to sustain flight loads and flexible membranes as lift surfaces, the major advantage of semi-monocoque construction is that the functions of aerodynamic profile and load-carrying structure are combined. Hence, the visible cylindrical barrel of a rocket serves to contain the internal fuel as a pressure vessel, sustains the imposed flights loads and also defines the aerodynamic shape of the rocket. Because the external skin is a working part of the structure, this type of construction is known as stressed skin or monocoque. The even distribution of material in a monocoque means that the entire structure is at a more uniform and lower stress state with fewer local stress concentrations that can be hot spots for crack initiation.
Second, curved shell structures, as in a cylindrical rocket barrel, are one of the most efficient forms of construction found in nature, e.g. eggs, sea-shells, nut-shells etc.. In thin-walled curved structures the external loads are reacted internally by a combination of membrane stresses (uniform stretching or compression through the thickness) and bending stresses (linear variation of stresses through the thickness with tension on one side, compression on the other side, zero stress somewhere in the interior of the thickness known as the neutral axis). As a rule of thumb, membrane stresses are more efficient than bending stresses, as all of the material through the thickness is contributing to reacting the external load (no neutral axis) and the stress state is uniform (no stress concentrations).
In general, flat structures such as your typical credit card, will resist tensile and compressive external loads via uniform membrane stresses, and bending via linearly varying stresses through the thickness. The efficiency of curved shells stems from the fact that membrane stresses are induced to react both uniform stretching/compressive forces and bending moments. The presence of a membrane component reduces the peak stress that occurs through the thickness of the shell, and ultimately means that a thinner wall thickness and associated lower component mass will safely resist the externally applied loads. This is important as the bending stiffness of thin-walled structures is typically at least an order of magnitude smaller than the stretching/compressive stiffness (e.g. you can easily bend your credit card, but try stretching it).
Bending and membrane stress states
Alas, as so often in life, there is a compromise. Optimising a structure for one mode of deformation typically makes it more fragile in another. This means that if the structure fails in the deformation mode that it has been optimised for, the ensuing collapse is most-likely sudden and catastrophic.
As described above, reducing the wall-thickness in a monocoque construction greatly helps to reduce the mass of the structure. However, the bending stiffness scales with the cube of the thickness, whereas the membrane stiffness only scales linearly. Hence, in a thin-walled structure we ideally want all deformation to be in a membrane state (uniform squashing or stretching), and curved shell structures help to guarantee this. However, due to the large mismatch between membrane stiffness and bending stiffness in a thin-walled structure, the structure may at some point energetically prefer to bend and will transition to a bending state.
This phenomenon is known as buckling and is the bane of thin-walled construction.
One of the principles of physics is that the deformation of a structure is governed by the proclivity to minimise the strain energy. Hence, a structure can at some point bifurcate into a different deformation shape if this represents a lower energy state. As a little experiment, form a U-shape with your hand, thumb on one side and four fingers on the other. Hold a credit card between your thumb and the four fingers and start to compress it. Initially, the structure reacts this load by compressing internally (membrane deformation) in a flat state, but very soon the credit card will snap one way to form a U-shape (bending deformation).
The reason this works is because compressing the credit card reduces the distance between two edges held by the thumb and four fingers. The credit card can satisfy these new externally imposed constraints either by compressing uniformly, i.e. squashing up, or by maintaining its original length and bending into an arc. At some critical point of compression the bending state is energetically more favourable than the squashed state and the credit card bifurcates. Note that this explanation should also convince you that this form of behaviour is not possible under tension as the bifurcation to a bending state will not return the credit card to its original length.
The advantage of curved monocoques is that their buckling loads are much greater than those flat plates. For example, you can safely stand on a soda can even though it is made out of relatively cheap aluminium. However, once the soda can does buckle all hell breaks loose and the whole thing collapses in one big heap. What is more, curved structures are very susceptible to initial imperfections which drastically reduce the load at which buckling occurs. Flick the side of a soda can to initiate a little dent and stand back on the can to feel the difference.
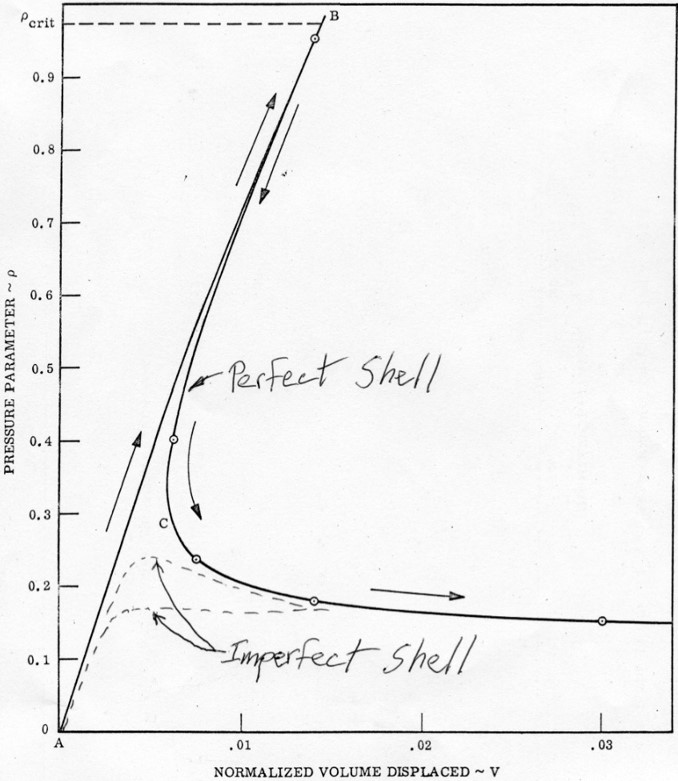
Imperfection sensitivity of a cylinder. The plot shows the drastic reduction in load (vertical axis) that the perfect cylinder can sustain with increasing deformation (horizontal axis) once the buckling point has been passed. This means that an imperfect (real) shell will never reach the maximum load but diverge to the lower load level straight away.
This problem is exacerbated by the fact that the shape of the tiny initial imperfections, typically of the order of the thickness of the shell, can lead to vastly different failure modes. Thus, the behaviour of the shell is emergent of the initial conditions. In this domain of complexity it is very difficult to make precise repeatable predictions of how the structure will behave. For this reason, curved shells are often called the “prima-donna” of structures and we need to be very careful in how we go about designing them.
A rocket is naturally exposed to compressive forces as a result of gravity and inertia while accelerating. In order to increase the critical buckling loads of the cylindrical rocket shell, the skin is stiffened by internal stiffeners. This type of construction is known as semi-monocoque to describe the discrete discontinuities of the internal stiffeners. A rocket cylinder typically has internal stringers running top to bottom and internal hoops running around the circumference of the cylindrical skin.
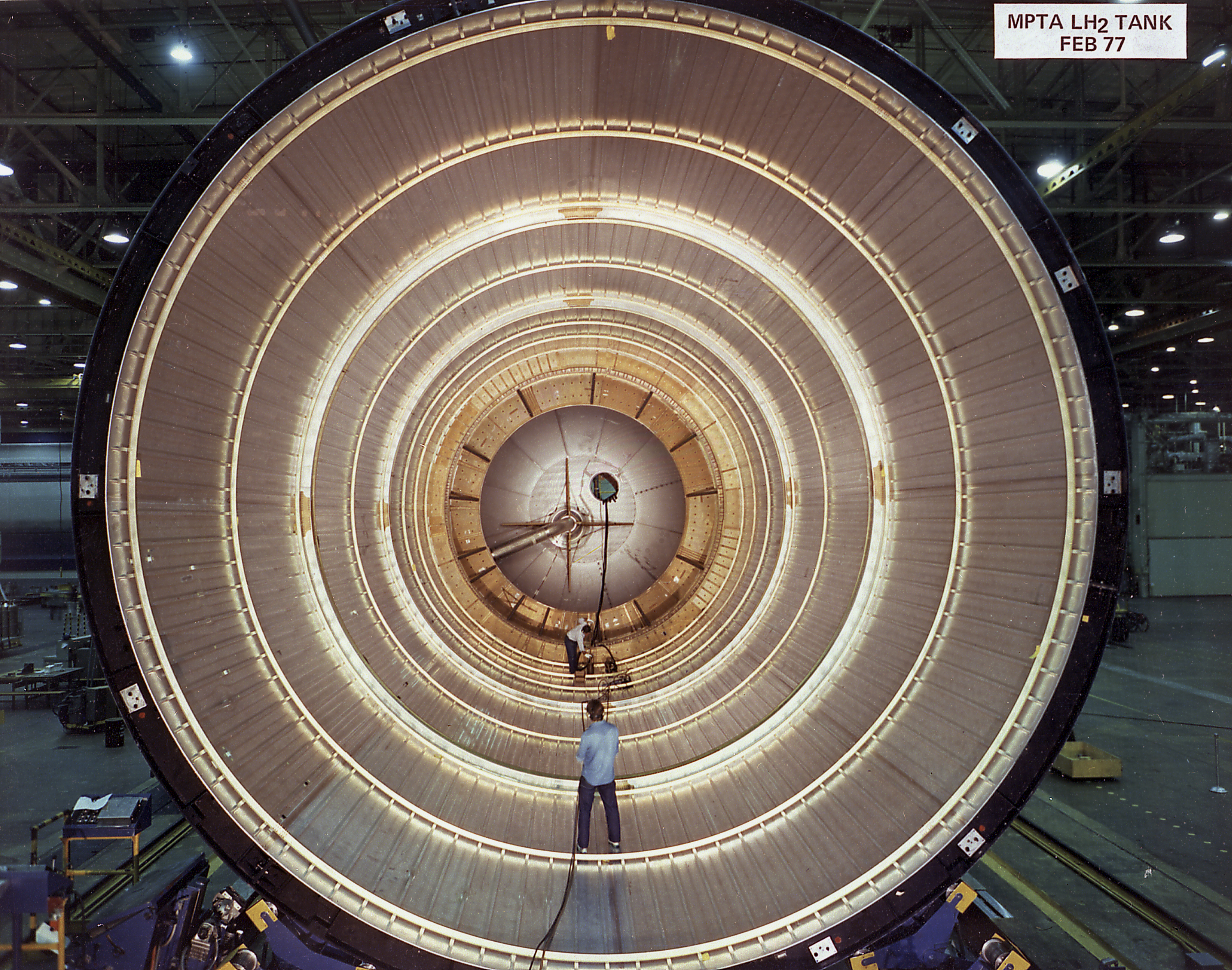
Space Shuttle internal structure of propellant tank. Note the circumferential hoops and longitudinal stringers that help, among other things, to increase the buckling load (via Wikimedia Commons).
The purpose of these stringers and hoops is twofold:
- First, they help to resist compressive loading and therefore remove some of the onus on the thin skin.
- Second, they break the thin skin into smaller sections which are much harder to buckle. To convince yourself, find an old out-of-date credit card, cut it in half and repeat the previously described experiment.
The cylindrical rocket shell has a second advantage in that it acts as a pressure vessel to contain the pressurised propellants. The internal pressure of the propellants increases the circumference of the rocket shell, and like blowing up a balloon, imparts tensile stretching deformations into the skin which preempt the compressive gravitational and inertial loads. In fact, this pressure-stabilisation effect is so helpful that some old rockets that you see on display in museums, most notoriously the Atlas 2E rocket, need to be pressurised artificially by external air pumps at all times to prevent them from collapsing under their own weight. If you look at the diagram below you can see little diamond-shaped dimples spread all over the skin. These are buckling waveforms.

Atlas 2E Ballistic Missile with buckling “diamonds” along the entire length of the external rocket skin (via Wikimedia Commons)
NASA Langley Research Center has been, and continues to be, a leader in studying the complex failure behaviour of rocket shells. To find out more, check out the video by some of the researchers that I have worked with who are developing new methods of designing the next generation of composite rocket shells.
